日本科学家开发出遥控机器人蟑螂 “半机械昆虫”设计取得突破!
日本理化学研究所(RIKEN)的研究人员最近开发和创造了一种遥控机器人蟑螂,该系统配备微型无线控制模块,由可充电的薄膜太阳能电池供电。尽管具有机械装置,但超薄的电子设备和柔性材料可以使这种机器人昆虫自由移动。
由日本理化学研究所开创性研究集群(CPR)的研究人员组建的一个国际团队于2022年9月5日在科学期刊《npj-柔性电子》上发布了这个结果。据悉,这一研究成就将有助于使机器人昆虫的应用成为现实。
科学家一直在尝试设计“半机械昆虫”(一部分是昆虫,一部分是机器)帮助检查危险区域和监测环境。然而,为了使机器人昆虫变得更加实用,操作人员必须能够长时间远程遥控。这需要无线控制他们的腿部行进,并由微型可充电电池供电。
保持电池电量充足至关重要,因为没有人希望失控的机器人蟑螂四处游荡。虽然可以建造为电池充电的坞站,但它们返回和充电的需要可能会影响时间敏感型任务的执行。因此,最好的方法是采用板载太阳能电池,以确保电池持续充电。
当然,这一切说起来容易做起来难。为了成功地将这些设备集成到表面积有限的蟑螂体内,工程团队需要开发一种特殊的背包和超薄太阳能电池模块,还需要采用超强的粘附系统,以使长时间保持连接,同时确保自然飞行。
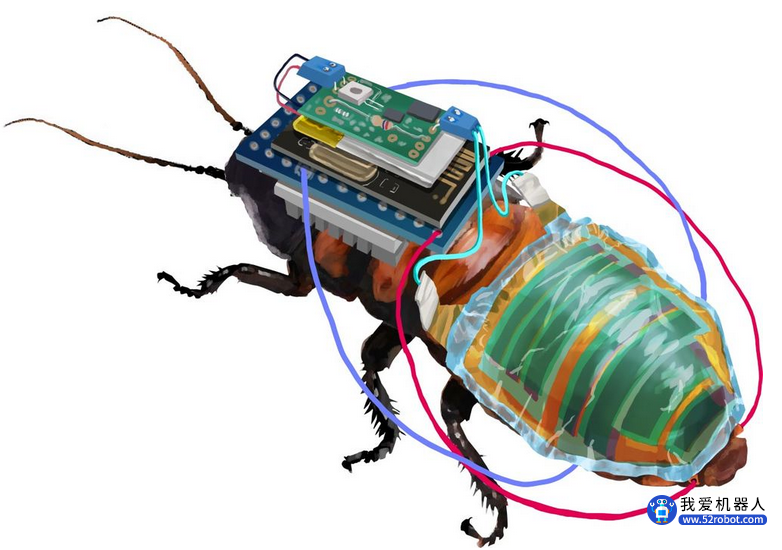
在日本理化学研究所Kenjiro Fukuda的带领下,研究小组对长约6厘米(2.4英寸)的马达加斯加蟑螂进行了实验。他们使用专门设计的背包将腿部无线控制模块和锂聚合物电池安装到机器人蟑螂上半身后背上。这是根据蟑螂模型的身体建模并采用弹性聚合物进行3D打印的,就像是完美贴合蟑螂后背曲线的一个背包,使刚性电子设备能够稳定地安装在机器人蟑螂身上。
机器人蟑螂采用0.004mm厚的超薄有机太阳能电池模块供电。Fukuda表示,“安装在蟑螂身体上的超薄有机太阳能电池模块实现了17.2mW的功率输出,是目前最先进的昆虫能量收集装置的功率输出的50倍以上。”
事实证明,这种超薄且灵活的有机太阳能电池以及附着在蟑螂身上的做法可以确保其自由活动。在仔细检查了蟑螂的运动之后,科学家们意识到其腹部的形状发生了变化,部分外骨骼重叠。为了适应这一点,他们将粘合剂和非粘合剂部分交错放置在薄膜上,使它们可以弯曲但也能保持连接。当测试较厚的太阳能电池薄膜时,或者当薄膜均匀附着时,蟑螂需要两倍的时间才能跑完相同的距离,同时在翻倒时也很难翻过身来。
研究人员将这些组件与刺激腿部运动的电线一起整合到蟑螂体内,并对其进行了测试。太阳能电池采用模拟的阳光充电30分钟,便可以采用无线遥控器让它左右移动。
Fukuda说,“考虑到机器人蟑螂胸部和腹部在基本运动过程中的变形,其胸部采用的刚性和柔性元件的混合电子系统与腹部的超软装置似乎是机器人蟑螂的一种有效设计。此外,由于腹部变形并不是蟑螂所独有的功能,我们的策略可以将这些技术用于其他昆虫(例如甲虫),甚至未来可能会创造类似蝉这样会飞的昆虫。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









