单向爬行的凝胶机器人!登上Science Robotics
能够穿过液体环境的刺激响应型无约束凝胶可以用于生物医学、微流体和软机器人应用。与使用流体或气动信号控制其运动的系留式机器人相比,无系留式水凝胶机器人可以大规模生产,在狭小空间内可操作,并且可以在没有电线或外部电源的情况下操作。刺激响应性水凝胶,可以响应于环境刺激(如热、光、pH、化学物质、生物化学物质和电磁场)而经历体积相变(膨胀和去膨胀),是构建无约束机器人的合适材料。此前,研究人员已将这些材料结构化,构建了一系列形状变化和功能转变的水凝胶,如夹具、流体致动器和阀门。
一类常见的刺激响应水凝胶是基于可逆热响应的聚(N-异丙基丙烯酰胺)(pNIPAM)。这些水凝胶在人体生理和环境温度范围内经历较低的临界溶液温度(LCST)转变。此外,LCST可以通过改变侧链长度、用相容共聚物交联或与离子液体混合来调节。先前的研究使用模塑、3D打印和立体光刻来构建可移动的微结构和介观结构的pNIPAM结构。此外,研究人员还使用单节段双层结构来制造各种爬行机器人。然而,仅使用水凝胶双层的溶胀和去溶胀来打破形态对称性(定向运动的基本要求)一直是一个挑战。为此,有研究人员通过棘齿基板或受限通道来打破对称性,实现双层水凝胶爬行器的直线运动;然而,这种策略限制了机器人的适用性。
近期,约翰·霍普金斯大学David H. Gracias团队研究了在具有悬浮连接体的分段活性热响应性聚(N-异丙基丙烯酰胺)(pNIPAM)和被动聚丙烯酰胺(pAAM)双层溶胀和退溶胀过程中,接触力自发不对称驱动的单向爬行凝胶的运动机制。研究表明,该凝胶爬行器可在平坦、无图案的基底上跨多个热循环进行一致的单向运动。作者使用有限元模拟并通过改变实验参数(如接头刚度和双层段的数量)来解释该机制。该工作建立了一个可用于设计可调控、可量产和多功能的无约束刺激响应型运动体的概念框架。该研究以题为“Untethered unidirectionally crawling gels driven by asymmetry in contact forces”的论文发表在最新一期《Science Robotics》上。

多段双层凝胶机器人的设计与制造
作者设计了具有两个不同形态和双层比率的双层多段机器人,通过悬浮连接体连接(图1A)。双层由热响应溶胀凝胶(活性材料)和非溶胀凝胶(被动材料)组成。作者使用直写式3D打印技术(DIW)来制造双层机器人。作者采用NIPAM作为活性油墨,丙烯酰胺(AAM)作为被动油墨。将单体与剪切致稀添加剂Laponite纳米粘土在水中混合来制备打印油墨。打印完成后,通过紫外线(UV)曝光交联结构。此外,作者开发了一种支撑材料,它由Laponite水溶液组成,在制造过程中支撑第二层凝胶。由于Laponite在UV固化过程中不交联,因此当结构在水中膨胀形成悬浮连接体时,支撑材料很容易溶解(图1B)。
在支撑层溶解后,将机器人在水中进行热循环(图1C)。作者将驱动装置加热到LCST以上,以确保凝胶本身的温度高于LCST。作者修改了接头刚度、形态和双层段的数量,以研究这些参数对机器人不对称性和爬行位移的影响(图1,D和E)。
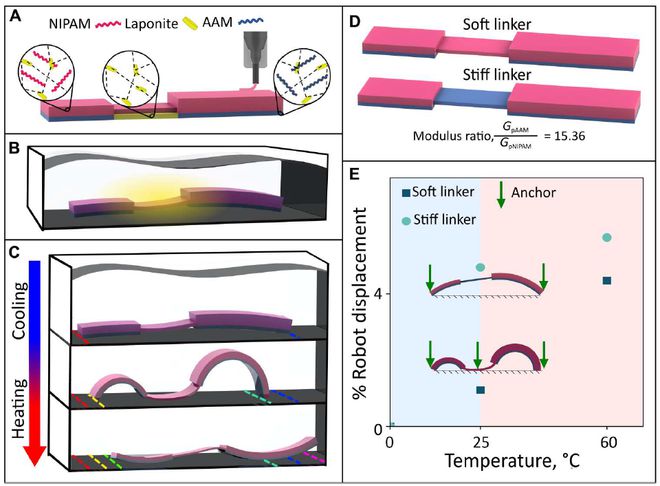
图1. 带有悬浮接头的多段凝胶机器人的设计和制造。
柔性连接体和双层的形态可打破对称性
作者通过加热和冷却过程来调控双层结构的形态。在冷却半周期中,最薄的双层由于其较小的特征扩散长度而最快达到其平衡曲率。其具有所有双层中最大的曲率,因其弯曲刚度是最低的(图2A、B)。作者还对双层溶胀和退溶胀引起的瞬态弯曲进行了有限元分析,以确定水凝胶的溶胀和退溶胀特性。我们通过修改本构模型来描述pNIPAM的快速去溶胀,包括溶胀和去溶胀过程的两种不同扩散率(图2C)。分析结果表明,致动时间对pNIPAM的扩散率和双层厚度比最敏感。对于活性材料,具有较小厚度比和较大扩散率的双层结构的致动时间较短。
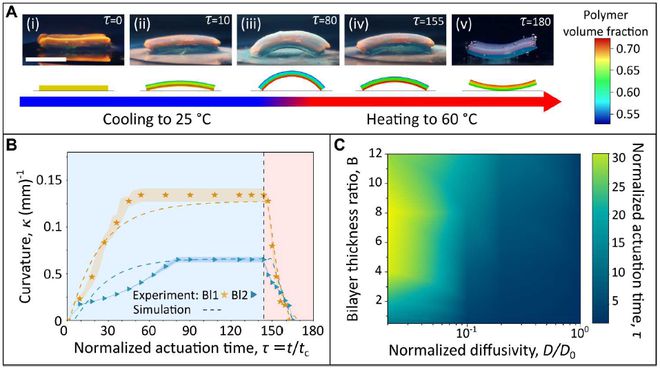
图2. 通过在热循环期间改变厚度比来调节双层的致动时间和曲率。
在冷却半周期期间,机器人从60°C的固化状态膨胀至室温(25°C),两个双层段由于膨胀而产生弯曲。同时,悬浮的连接体膨胀和下垂,与两个双层的外缘一起接触到基底表面。这种下垂导致接头部分充当了锚的作用,并在半周期结束时将双层移向它(图3A,i至iii)。一旦切换到加热半周期,机器人就从其膨胀的弯曲状态转变为塌陷状态(图3A,iii至v)。连接体变直并达到其最初的悬浮状态,而两个双层发生不同步地下落。在去溶胀过程中,由于较大和较小的双层之间的尺寸和曲率不对称,锚从连接体转移到较大的双层。最终,当小双层和连接体被拉向大双层时,机器人实现了单向移动。作者还发现,改变连接段的刚度会加速凝胶机器人的爬行速度。作者打印了相同尺寸的两段机器人,并用刚性pAAM接头替换了柔性pNIPAM接头(图3,D至F)。在冷却半周期中,刚性接头保持其扁平形状。刚性连接体保持悬浮在双层之间,不起任何锚定作用。这导致了较大和较小的双层之间的净接触力不对称性增加,单向位移从每周期4.4%增加到5.6%。
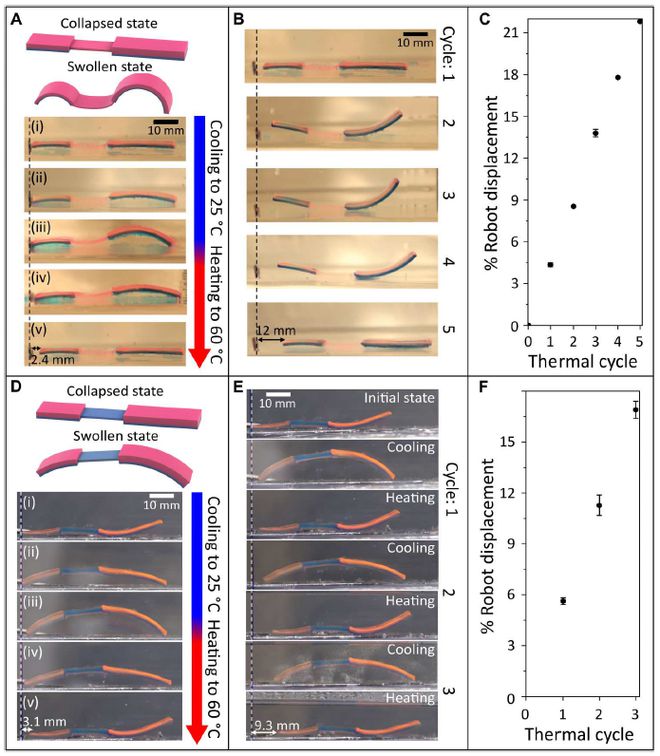
图3. 具有柔性或刚性连接件的两段式机器人的热循环过程。
接触力不对称产生单向运动
接下来,作者通过有限元分析,探究了接触力不对称是如何产生单向运动的。分析结果表明,较小双层的左边缘向右移动,较大双层的右边缘向左移动(图4A)。双层段的相对运动导致机器人接头中心发生了0.1%的平移。pNIPAM和pAAM之间的去溶胀应变不匹配导致机器人在加热过程中向上弯曲。较大双层的弯曲/弯曲和接头的去溶胀将机器人拉向右侧,并在热循环期间造成1.1%的净位移(图4B)。
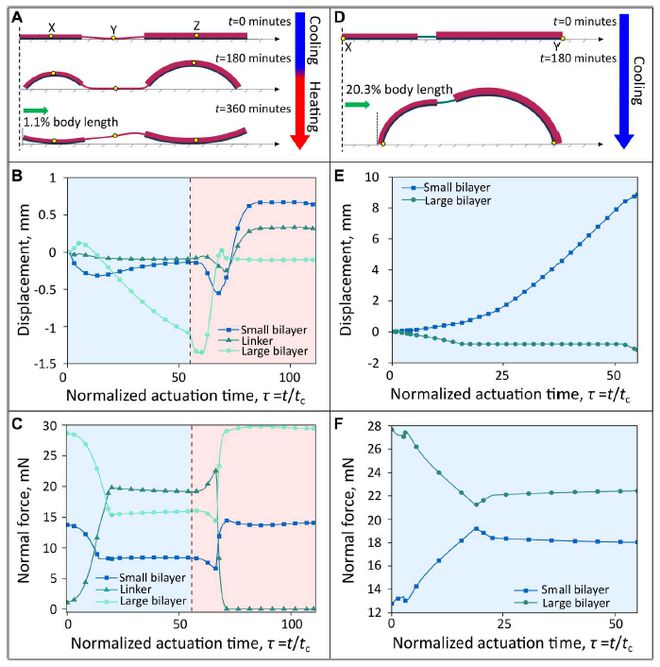
图4. 具有不同连杆的两段式机器人的有限元分析。
最后,作者研究了双层段的数量和连接模式对凝胶爬行器的形态和位移的影响。这些因素会导致双层节段之间产生更大的不对称性,从而增加机器人的位移。将机器人的双层段的数量从两个改变为四个(图5A、D)。作者还将接头从完全的pNIPAM或pAAM组成(图3)重新设计为交替的pAAM和pNIPAM条带的组合(图5)交替的几何结构将允许接头伸长,同时保持其形状。
首先,作者3D打印了一个具有交替链接器的三段机器人,该凝胶机器人由两个小的和一个大的双层段组成,由五条pAAM和六条pNIPAM组成的接头连接。在冷却半周期中,接头伸长,对接触表面的锚定最小,有效地表现为刚性接头(图5A)。在加热半周期期间,双层曲率的形态差异和两个小双层段的不均匀分布都导致了不对称,最终实现了每周期7.63%的大位移。
此外,作者3D打印了具有交替链接器的四段机器人。这种凝胶机器人由两个小的和两个大的双层段组成,由两条pAAM和三条pNIPAM组成的接头连接。在冷却半周期中,连接体再次伸长,对接触表面的锚定最小,也有效地表现为刚性连接体。由于两个更大的双层侧面的接触面积更大,机器人始终朝着单个方向移动,可实现高达12.2%的位移。研究表明,可以通过改变双层和接头的形态和相对接触面积来操纵机器人中的法向力不对称,进而控制机器人在周期中的位移。
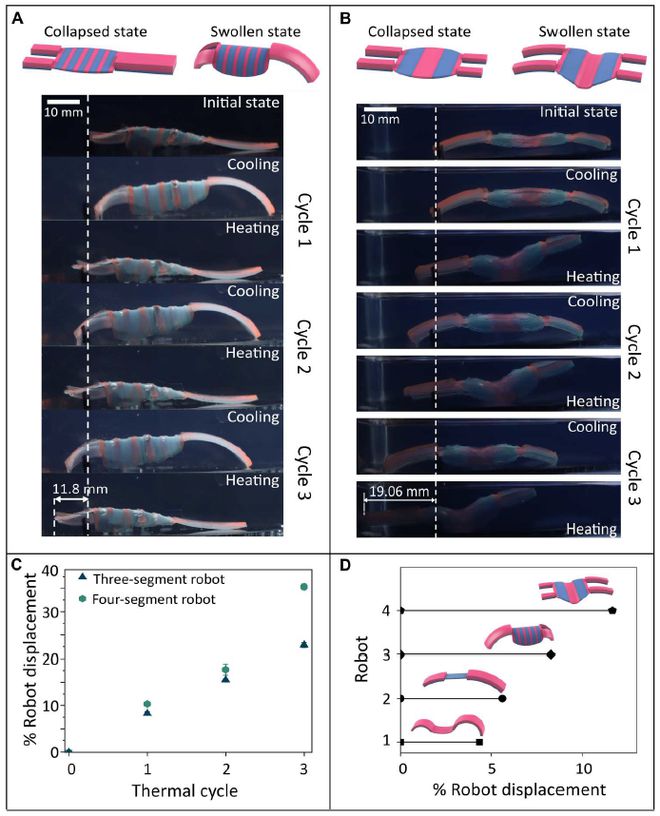
图5. 具有不同双层段和接头形态的凝胶机器人的位移。
小结
该工作利用凝胶段的瞬时膨胀和去膨胀驱动,打破了接触力的空间(前后)对称性,实现了在平坦表面上的直线运动。研究表明,机器人的结构设计可引起接触表面力的不对称性,实现对称性的自发破坏,而无需在凝胶表面或基底上进行额外的图案化。作者使用具有不同厚度比和横向尺寸的凝胶双层来诱导溶胀和去溶胀的时空不对称。作者还使用了具有不同刚度的悬浮接头,并改变了双层段的数量和接头模式,以操纵接触力不对称性并调整机器人位移。作者在多个加热和冷却半周期内对机器人进行了表征,并使用有限元分析模拟了它们的热化学机械行为。该工作建立了一个可用于设计可调控、可量产和多功能的无约束刺激响应型运动体的概念框架。
文章链接:https://www.science.org/doi/10.1126/scirobotics.add2903
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









