国产机器人龙头埃斯顿全面布局蜕变进击

发展历程
1993年公司成立
2002年主营金属成形机床数控系统
2006年切入金属成形机床电液伺服系统
2008年发展交流伺服系统服务
2012年大力发展智能工业机器人业务
2015年在深交所上市
2016年收购上海普莱克斯股权,切入压铸集成领域
2016年参股意大利Euclid,掌握机器人3D视觉技术
2017年收购英国TRIO,强化运动控制技术
2017年收购扬州曙光68%股权,进入军工领域
2017年参股美国BARRETT,进入服务机器人领域
2017年收购德国MAI50.01%股权,掌握智能化装配和测试生产线技术
2018年机器人产业园正式投产,国内首条机器人生产机器人流水线
2019年并购全球焊接机器人巨头CLOOS
2021年与河南骏通合作,成功进入专用车整车制造产线
2022年成立新能源事业部,进入光伏和锂电市场

股权结构
1. 董事长吴波通过持有派雷斯特96.89%股权、自身持有12.66%股权、埃斯顿投资(1.84%)间接持有合计约42%,为实控人
2. 香港中央结算有限公司持股16.74%
业务布局
从控制器、伺服系统、电控系统到机器人本体和软件算法形成机器人全产业链
1. 自动化核心部件及运动控制系统
营收占比约29%
主要分为自动控制、运动控制、传动控制及数控系统
产品主要应用在金属成形数控机床、机器人、纺织机械、3C电子、锂电池设备、光伏设备、包装机械、印刷机械、木工机械、医药机械及半导体制造设备等智能装备的自动化控制领域
2. 工业机器人及成套设备
营收占比约71%
主要分为工业机器人及工业机器人工作站
现有57种型号工业机器人产品,包括六轴通用机器人、四轴码垛机器人、SCARA机器人以及行业专用定制机器人
Cloos整合完成后,焊接机器人成为最强的细分业务

产品体系
1. 运动控制核心部件
HMI、数控系统、运动控制、驱动产品、电机产品
2. 工业机器人
多关节机器人、焊接机器人
3. 数字化产品
E-noesis开放式工业互联网平台、PCS产线工艺总控系统、工业软件
4. 智能控制单元
5. 标准化附件
标准附件、通用机械设备、系统应用产品
历年营收
2017年,实现营收10.77亿,同比增长58.69%,归母净利润0.93亿,同比增长35.67%
2018年,实现营收14.61亿,同比增长35.72%,归母净利润1.01亿,同比增长8.79%
2019年,实现营收15.81亿,同比增长8.23%,归母净利润0.63亿,同比增长-37.95%
2020年,实现营收25.10亿,同比增长58.74%,归母净利润1.28亿,同比增长103.97%
2021年,实现营收30.20亿,同比增长20.33%,归母净利润1.22亿,同比增长-4.75%
2022年前三季度,实现营收25.42亿,同比增长10.45%,归母净利润1.20亿,同比增长36.89%
2017-2021五年跟踪
毛利率:33.44%、35.99%、36.01%、34.13%、32.54%
净利率:9.46%、7.80%、6.20%、6.04%、5.19%
研发费用(研发费用+开发支出):0.22亿、1.5亿、1.77亿、2.04亿、3.03亿
产能建设
上半年国内机器人出货量位列首位
已建成国内首家由自主机器人生产机器人的自动化和信息化的智能工厂,实现了机器人本体生产的自动化、信息化
正在建设中的总部二期项目将于2023年建成,投产后预计实现年产5万台套
陆续收购TRIO、Cloos等全球细分领域的优秀企业,研发团队分布全球多地
竞争力分析
1. “通用 + 细分”布局,产品丰富
2. 核心零部件的高度自主化率
3. 快速落地智能工厂,实现可复制的规模化商业拓展
4. 下游应用经验和客户资源渠道广泛
下游合作客户
1. 光伏领域
隆基绿能、晶澳科技、阿特斯等
2. 木工建材
弘亚、常州纳弘、金牌亚洲、东鹏、蒙娜丽莎等
3. 消费电子和锂电
蓝思科技、先导智能、拓斯达
4. 智能包装
中粮集团、五粮液、顶益食品等
5. 电动车
比亚迪、绿源、新日、雅迪等
6. 金属加工
通快、苏州爱克、江苏杨力等
全产业链布局
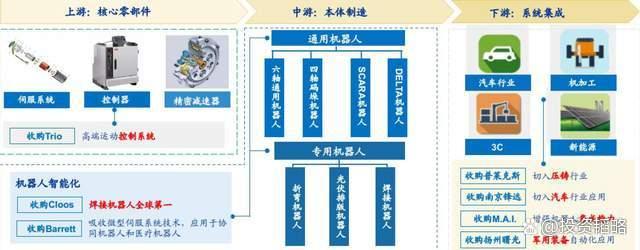
1. 上游 -- 核心零部件
伺服系统 + 控制器 + 精密减速器
Trio提供高端运动控制系统
Cloos焊接机器人全球第一
Barrett吸收微型伺服系统技术,应用于协同机器人和医疗机器人
2. 中游 -- 本体制造
通用机器人:六轴通用机器人、四轴码垛机器人、SCARA机器人、DELTA机器人
专用机器人:折弯机器人、光伏排版机器人、焊接机器人
3. 下游 -- 系统集成
产品广泛应用于汽车行业、3C行业、新能源行业、机加工行业
收购普莱斯特,切入压铸行业
收购南京逢远,切入汽车行业应用
收购M.A.I.增强机器人集成能力
收购扬州曙光切入军用装备自动化应用
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















