《Science Advances》:一种用于心脏介入治疗的多功能软体机器人
在微创血管内手术中,外科医生依靠低灵活度和高纵横比的导管来达到解剖目标。然而,心脏跳动的内部环境对几个解剖位置提出了独特的挑战,使得医生难以灵活地操纵介入工具并对心脏内相应目标施加足够的力。
近期,来自Boston University的Tommaso Ranzani团队在《Science Advances 》杂志上发表题为“A multifunctional soft robot for cardiac interventions”的封面文章,展示了一种毫米级的软机器人平台,它可以在心脏入口处部署和自稳定,并引导现有的介入工具达到目标位置。在右心房内的两例示范心内手术中,机器人平台提供了足够的灵活性来到达多个解剖目标,足够的稳定性来保持与运动目标的持续接触,以及足够的机械结构来产生牛顿级别的力。该设备解决了目前微创心内介入的挑战,它使基于导管的心脏介入手术有了更长远的发展。
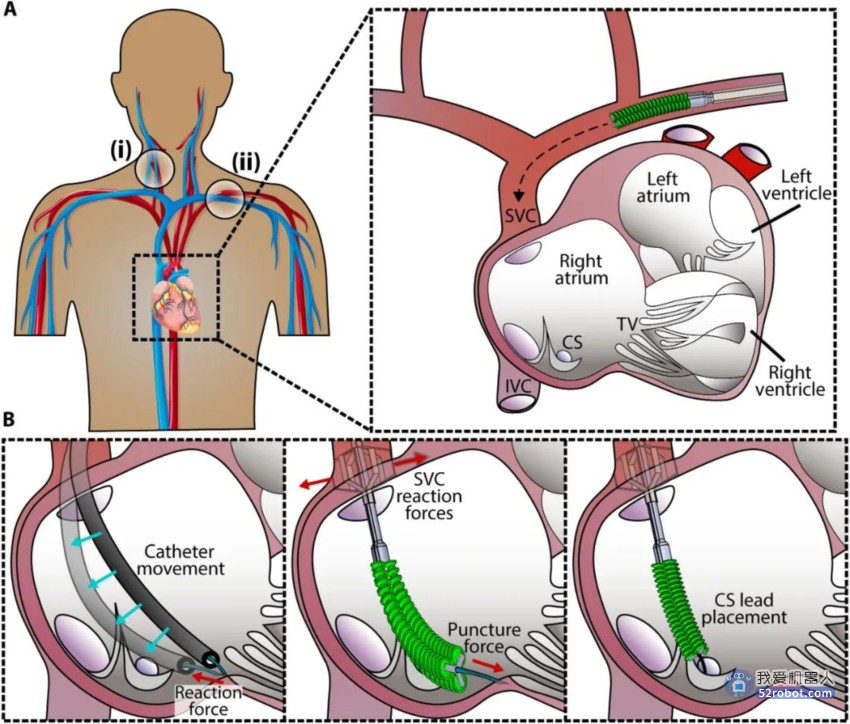
图1 设备的临床工作应用流程
1. 血管内稳定机构
研究人员使用图2A所示的逐层工艺制造稳定组件。首先,分别对半刚性弹簧钢和柔性聚酰亚胺薄膜进行激光切割;使用生物相容的粘合剂将这些层粘合在一起,形弹簧钢夹聚酰亚胺薄膜的层压板;最后,在层压板上涂上一层柔软的热塑性聚氨酯(TPU)层,进行切割。将层压板包裹在一个3打印的多腔管周围(图2A)。多腔管中有用于驱动软机器人的三条流体管路和用于展开稳定机构的两根鲍登线。稳定机构可从收缩态的8mm直径扩展为32mm。TPU外壳可以储存弹性势能,使得稳定机构在未工作时处于折叠状态。图2B展示了稳定机构介入猪的上腔静脉后,将其移动不同距离产生的径向力和轴向力,图2C则测试了稳定机构展开后对静脉内血液的流体阻力,并和球囊导管进行了对比,表明稳定机构的介入不会对血流造成阻碍。为了确定安全性,研究人员测量了拉伸鲍登线驱动稳定机构张开时对静脉管腔产生的力,并将测试结果输入到Abaqus中模拟计算应力集中,得到当鲍登线的最大张力为 1.91 N 时,稳定机构产生 1.21 N 的径向力,该径向力在静脉上产生最大为 0.898 MPa的集中应力(图2D),并在最后解剖了实验过后的猪静脉,在显微镜下观察到内皮没有破损。
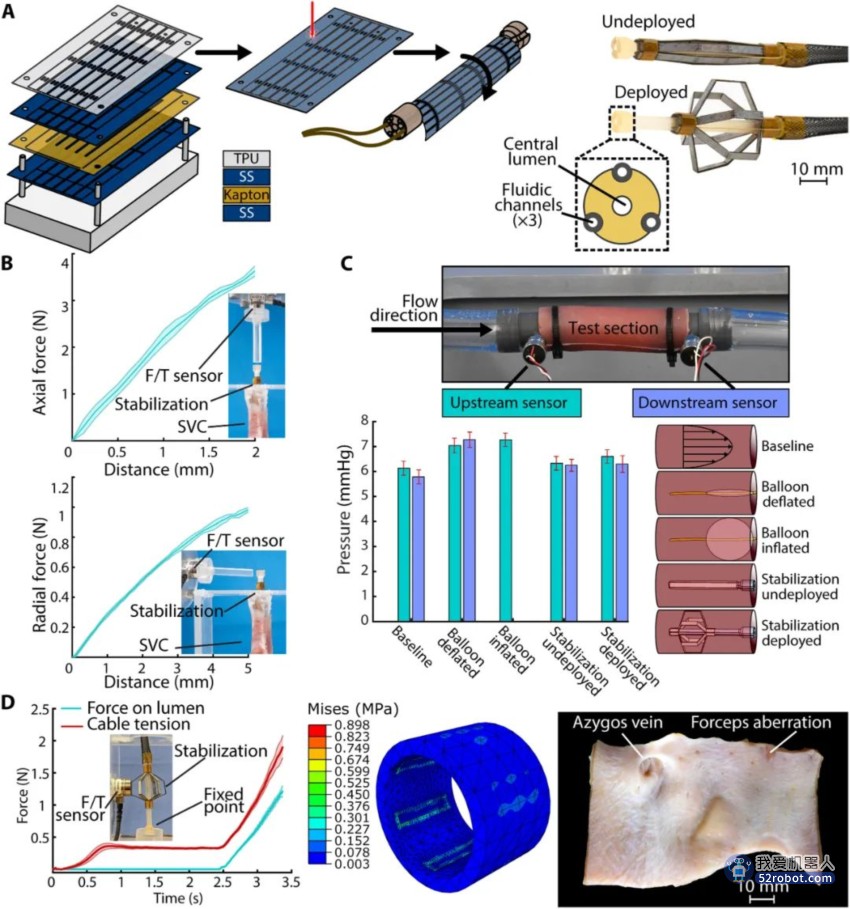
图2 稳定机构的设计、制造与表征
2. 软体机器人的介入引导
研究人员使用了一种之前研发的堆叠式球囊制动器(SBA)的软体机器人来引导手术器械,该软体机器人具有大膨胀比和高作用力的优点。该末端执行器由TPE(热塑性弹性体)和聚四氟乙烯(PTFE)两种材料热压制成,可以沿轴向压缩(图3a、b)。根据需要达到的长度对球囊单元进行堆叠,共堆叠了20层, 1mm厚的压缩球囊完全充气后可以膨胀为40mm。为了满足可进入静脉腔体的直径,可以在充气后固定软体机器人的长度,再进行放气,以径向压缩球囊(图3b),可以将直径为 15 mm 的三腔球囊径向压缩至最小直径 4.5 mm(图3c)
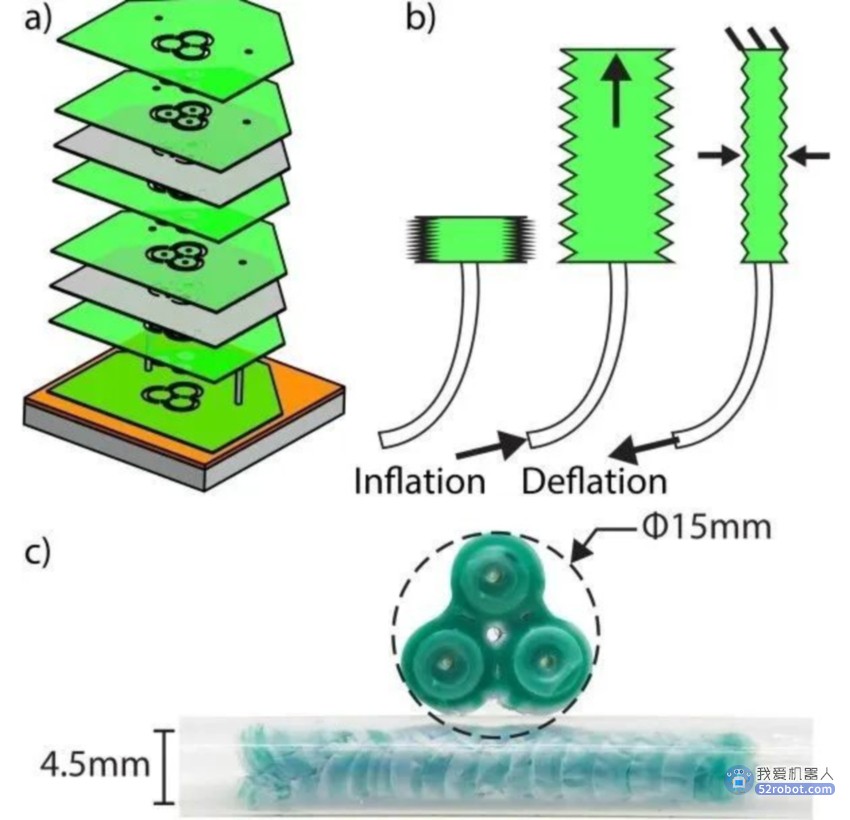
图3 软体机器人制造和径向压缩
3. 集成机器人平台
如图4为该集成的软体机器人平台,首先将软体机器人连接到稳定机构的3D打印多腔管上,用生物粘合剂将软体机器人粘在单层不锈钢基板上,再将基板粘在多腔管上 (图2a)。然后将该组件连接到一段30cm长的网状线缆上,该网状线缆包含三个流体管路和两个鲍登线缆,并且中间还有一段聚四氟乙烯管腔,可用于通过放置传统的手术器械,如导丝和导管。在介入机器人的控制端,定制的打印部件将鲍登线缆终端从中央通道和流体管路中分离出来(图4A)。中央通道可在任意位置允许用户插入手术器械,而流体管路连接到定制的注射器泵上,鲍登线被送入带有鲁尔锁阀连接器的注射器中,通过拉动注射器并锁定阀门,夹紧鲍登线,从而展开稳定机 (图4B)。
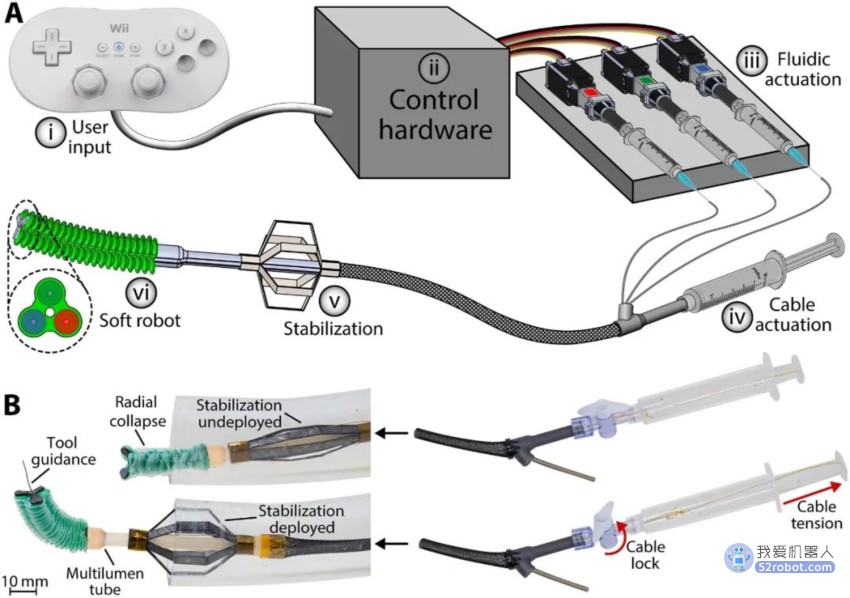
图4 集成的软体机器人平台
研究人员在软体机器人的尖端安装了2D工具导向器,以增加系统在引导介入工具时的硬度和精度(图5A和B)。工具导向器使用与稳定机构相同的制造方法。三个单向弯曲接头允许工具导向器在软机器人的径向折叠过程中向内折叠(图4B)。图5A展示了工具导向器对远端工具刚度和精度的提升效果,组件刚度可达6.3mN/mm,并能在软体机器人弯曲到90°时使工具与水平方向成97.8°的角度。
4. 软体机器人的工作空间
研究人员演示了软体机器人的工作空间的极端情况,将0.35毫米导丝的柔性端插入其工作通道,一个流体腔体充气,另外两个腔体放气的情况下,机械手可以弯曲到200°;在双腔弯曲情况下,可弯曲到207° (图5B)。图5C则通过运动解算和心脏的计算机断层扫描模型确定了该机器人可以满足临床手术的工作位置要求。图D表明该设备在X射线透视下可视,可用于注射造影液实现对心脏管状静脉的可视化。
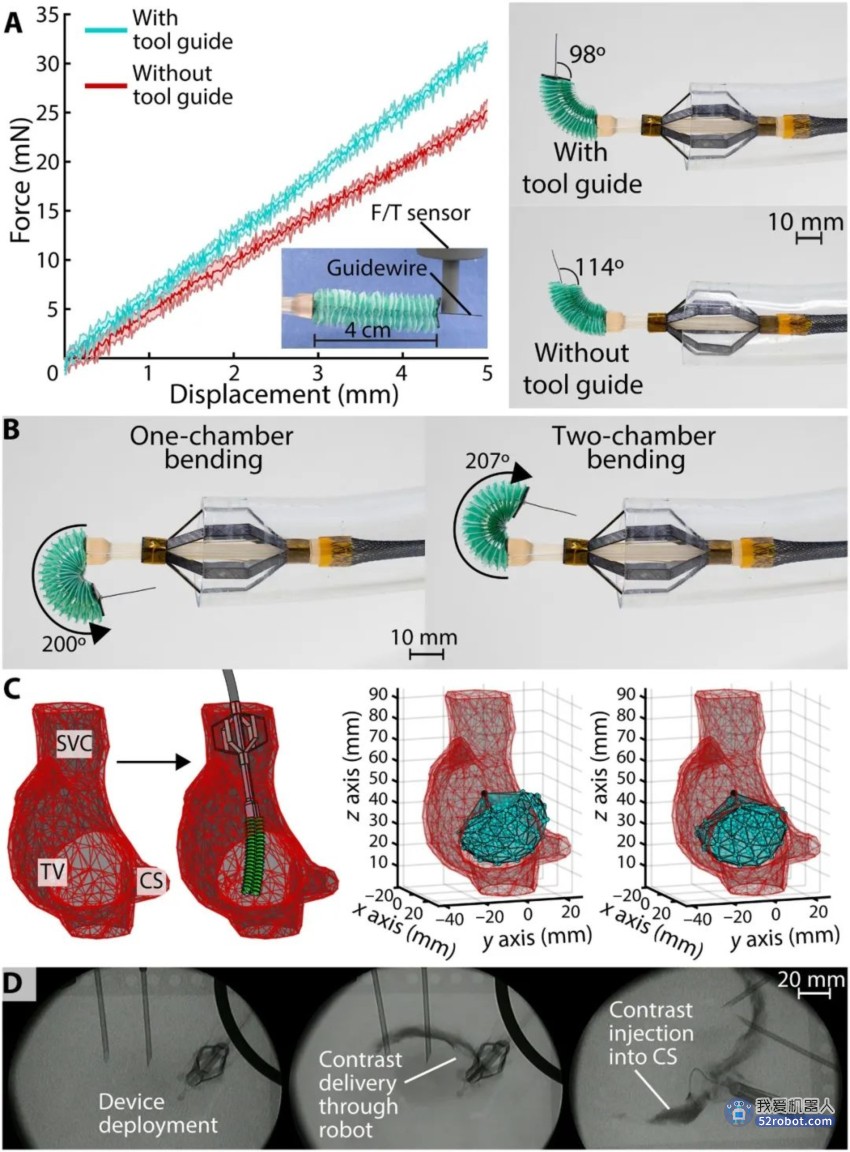
图5 集成机器人的主要特征
5. 体外演示实验
该装置被部署在直径25毫米的透明管中进行演。首先,要求软体机器引导一根0.9毫米的导丝依次穿过一块距离4cm的亚克力上五个直径为1cm的孔 (图6A),该操作计时90s完成,展示了软体机器人的灵巧性。下面,要求软体机器人按下注射器柱塞(图6B),注射器内装满了红色墨水,展示了软体机器人尖端能够产生足够的力。图6C展示了机器人平台可以通过外周血管系统,如锁骨下静脉,穿过≈90°弯曲腔道进入右心房。
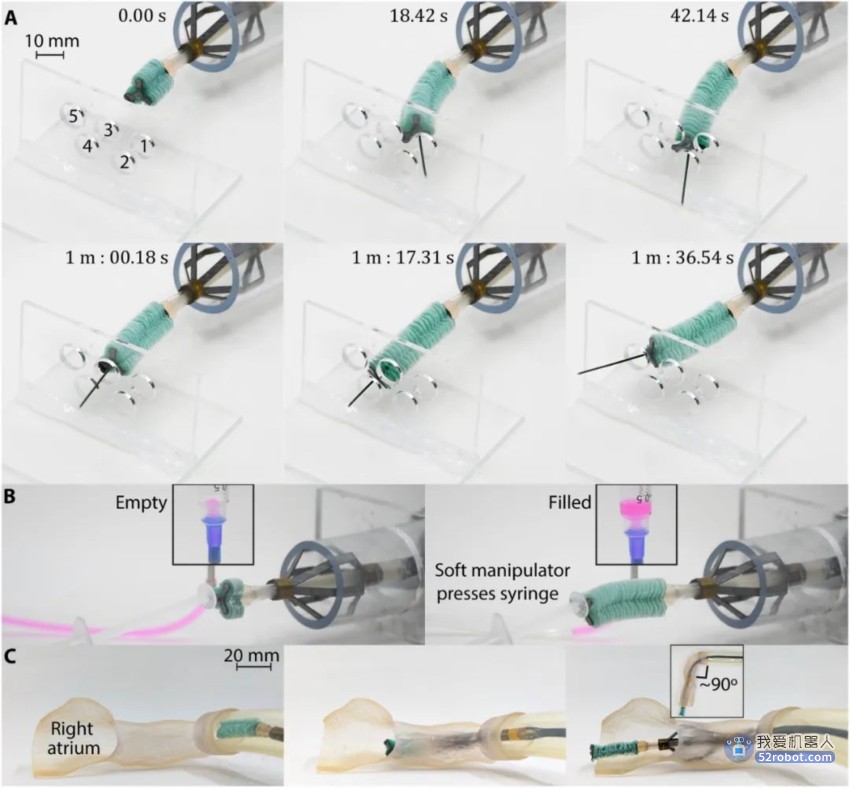
图6 集成机器人平台的体外演示
6. 模拟手术实验
为了进一步展示软体机器人的临床应用,研究人员在离体环境下展示了两例示范手术:冠状窦插管术、三尖瓣环穿刺术。主要通过记录手术所用时间以及对心脏软组织的损伤来评估手术效果。冠状窦插管术(图7C)各使用者完成手术的总体平均时间为 68 ± 37 s。三尖瓣环穿刺术各使用者完成手术的总体平均时间为 84.0s。
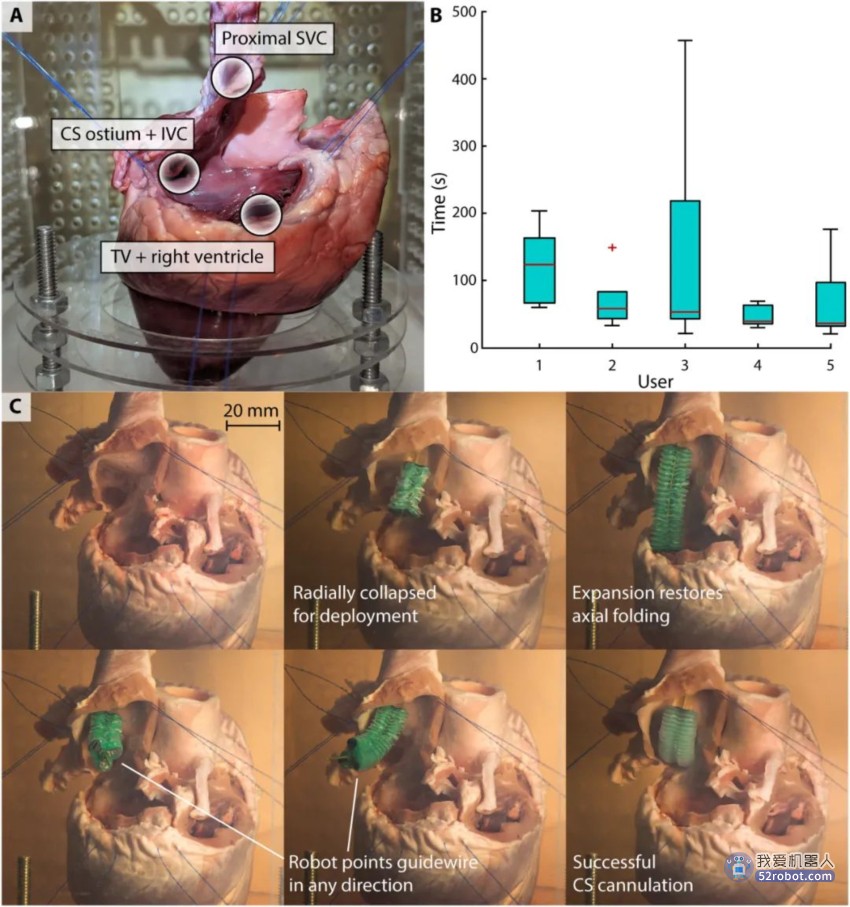
图7 冠状窦插管术模拟手术
综上所述,研究人员开发一个软体机器人平台,以心脏跳动环境下解决微创心内干预手术面临的临床挑战。该平台能够折叠并锁定在近端上腔静脉处并实现机构稳定,并通过软机器人操纵器引导介入工具达到右心房的目标位置,并传递与匹配生物组织所需的力。最后通过两例示范性手术的离体测试展示了该软体机器人平台在临床手术中的应用前景
文章来源:
https://www.science.org/doi/10.1126/sciadv.adi5559
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。



















