上海交大实现具有末端多功能集成的亚毫米级磁性纤维机器人
磁性纤维机器人在微创机器人手术中显示出巨大的应用潜力。然而,随着纤维机器人的小型化,在远端集成功能性微工具是一个具有挑战性的任务,因为它需要在曲率半径极小的纤维末端曲面上组装功能性结构。为此,上海交通大学马卓晨副教授等人提出了一种亚毫米纤维机器人,在远端集成有微操作工具,具体通过采用“Swiss roll”微装配策略来实现。这种方法可以在纤维机器人的曲面上一步装配多尺度结构(mm-μm),该多尺度结构是由mm级磁性薄膜和其上集成的μm级特征结构组成,通过装配可以实现2D平面薄膜变为3D曲面微工具。这种多尺度结构的设计灵感来自于猫科动物柔软的舌头表面覆盖有许多尖刺微结构,以此能帮助更好地提取食物。纤维机器人可以在磁场的操控下完成血管模型内凝块抓取、液体递送和采样等多种功能。该策略为纤维机器人远端功能部件的集成和组装提供了一种通用方法,对介入式医疗机器人的小型化和功能化具有重要意义。该研究于2023年11月23日以题为 “Magnetic Fiber Robots with Multiscale Functional Structures at the Distal End” 的论文发表在《Advanced Functional Materials》上。
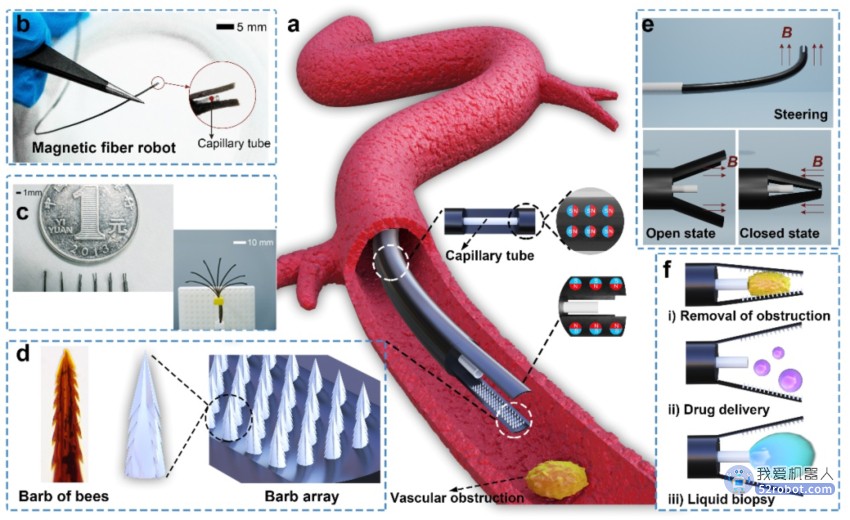
图1. 磁性纤维机器人的设计理念与功能示意
纤维机器人由磁性纤维本体、嵌入内部的毛细管和纤维末端微操作工具组成。嵌入式毛细管可以作为微通道,实现靶向输送或采样。纤维末端的微操作工具的设计中,倒刺阵列被集成在磁性薄膜上。由于纤维本体与末端微操作工具的磁化方向相互正交,因此利用正交的磁场可以分别独立控制纤维体的转向方向和末端工具的操作。垂直于机器人本体轴线的磁场控制机器人的导航方向,平行于机器人轴线的磁场控制机器人末端微操作工具的开合。由于这些关于机器人结构和磁化的特定设计,纤维机器人可以实现多种功能,包括血管内阻塞物的介入清除,靶向药物输送和液体采样。
为了实现对微夹持器状态的精确控制,使用OpenCV库开发了一个计算机程序。本程序设计用于识别微夹持器在纤维端的方向,即姿态识别。这种基于视觉的姿态识别系统增强了纤维机器人末端微夹持器的灵活性和通用性,从而使其能够在各种场景下执行复杂的任务。利用所开发的姿态识别程序,在玻璃血管模型中演示了纤维机器人的药物输送和液体采样功能。
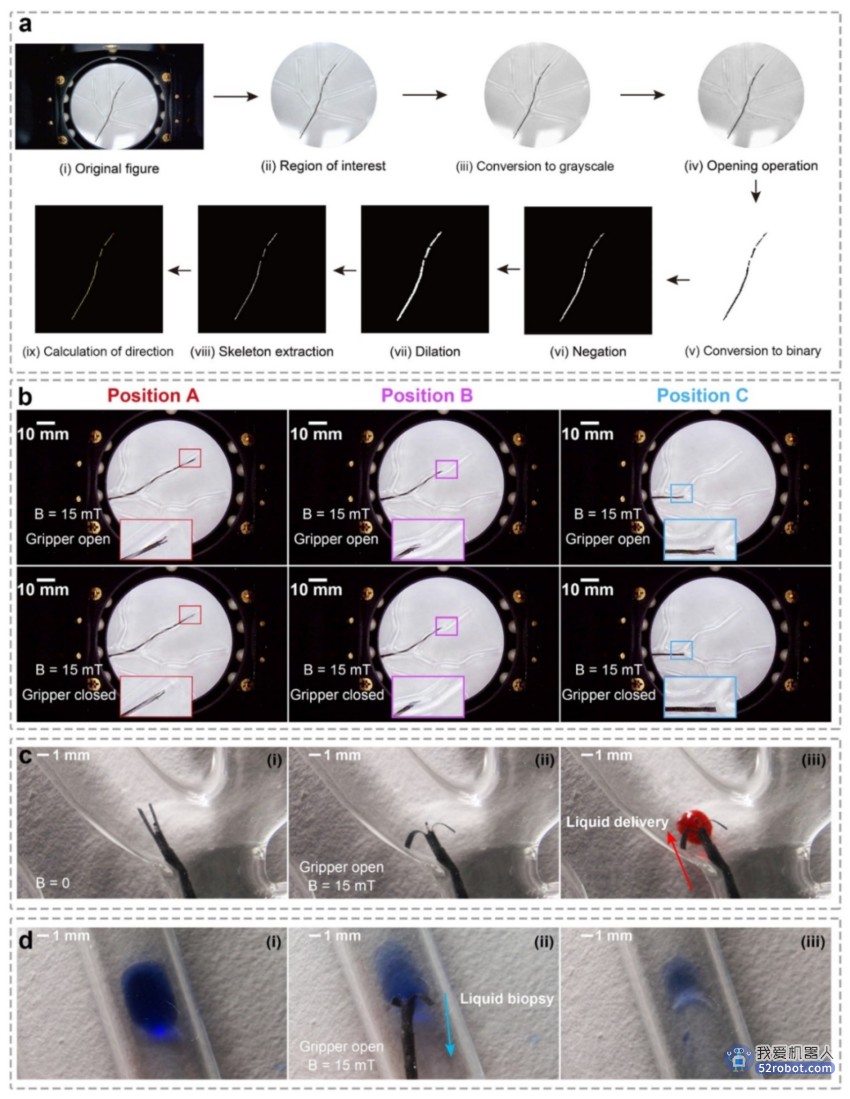
图2. 磁性纤维机器人的介入靶向递药及液体采样功能
为了完成导航任务,搭建了一个5自由度的操纵平台来控制磁体的位置和姿态。此外,该平台通过集成推进装置进一步形成了一个6 DOF导航系统。为了方便导航,系统顶部安装了摄像头,提供导航空间的视觉信息。为了实现纤维机器人在介入导航过程中的转向,利用安装在2自由度伺服电机上的永磁体来控制机器人的偏转角度。纤维机器人到达目标位置后,位于整个系统顶部的步进电机将支撑平台运送到亥姆霍兹线圈的工作空间中。利用亥姆霍兹线圈中的磁场,实现了纤维端微夹持器的驱动。三维亥姆霍兹线圈提供了产生任意方向磁场的便利,允许对微夹持器的磁驱动进行精确控制。由于可以通过前面描述的姿态识别程序识别纤维端部的方向,可以随时沿着纤维调整磁场的方向。因此,可以实现微夹持器在打开或关闭状态的实时切换,从而实现对纤维机器人进行介入手术的精确操控。在此基础上,实现了介入治疗纤维机器人的远程操作。操作人可以远程控制纤维机器人的运动和动作,在目标区域内进行精确的操作和导航。这种远程操作能力增强了纤维机器人执行各种介入程序的潜力,为医疗提供了微创和高度精确的方法。
为了验证磁性纤维机器人在介入治疗或手术中的潜力,在血管模型中进行了血管异物取出任务。在血管模型中放置人工血栓,采用前文所述的遥操作导航系统,对机器人进行了导航。当纤维机器人导航到目标位置后,通过沿轴向施加磁场将末端微夹持器切换到打开状态。然后将纤维机器人稍微向前推进,使夹持器能够包裹人造血栓。随后,将磁场方向反转,使微夹持器能够抓取血栓。最后,利用推进装置将纤维机器人连同捕获的血栓一起从血管模型中拉出。值得注意的是,在抓取到人工血栓的纤维机器人提取过程中,微夹持器需要保持闭合状态,以确保血栓掉落。但在此过程中,随着纤维在血管模型内移动到不同位置,其末端方向可能会发生变化。为了保证微夹持器在整个提取过程中保持闭合状态,需要根据纤维末端方向实时调整磁场方向。这是通过实现所开发的实时姿态识别程序来实现的,该程序可以准确地跟踪纤维端部的方向并相应地调整磁场方向。通过动态调节磁场方向,微夹持器可以始终保持闭合状态,保证血栓的成功取出。
该研究对三种集成了不同微结构的微夹持器进行了测试。第一种是一对平面薄膜,第二种是一对微锥阵列薄膜,第三种是一对微倒刺阵列薄膜。只有平面薄膜的微夹持器显示出较弱的抓取能力,无法有效抵抗扰动。带有微锥阵列的微夹持器的抓取能力略有提高,但在处理容器转角或转弯引起的扰动方面仍面临挑战。相比之下,具有微倒钩阵列的微抓取器在三种机器人中表现出最强的抓取能力。
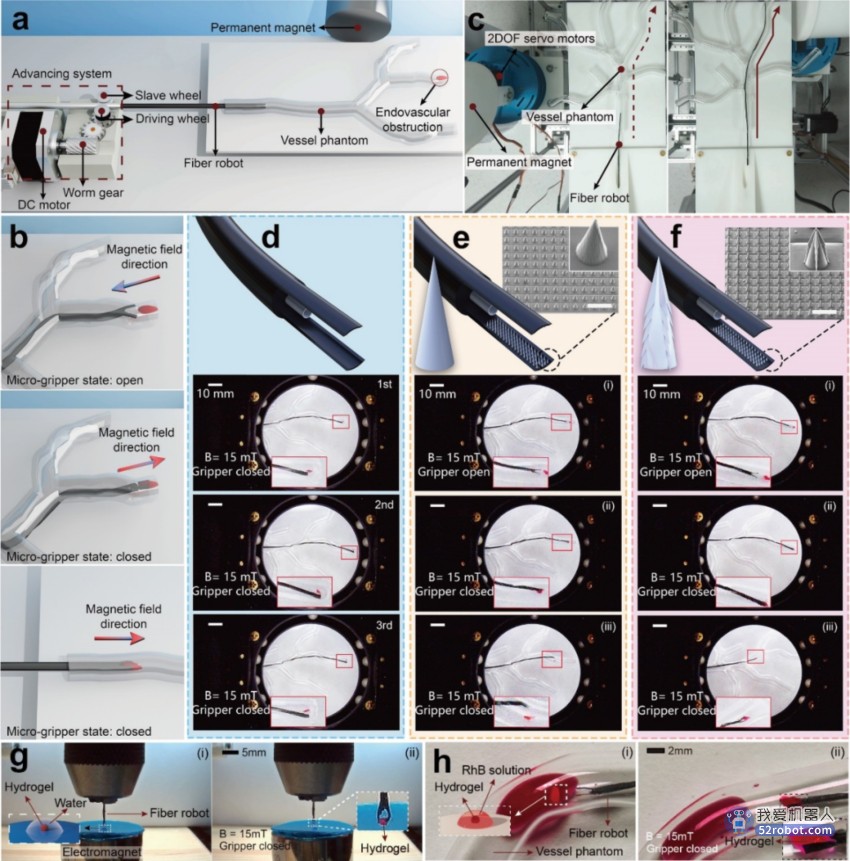
图3. 系统集成及机器人介入异物取出实验
以上成果,上海交通大学电子信息与电气工程学院自动化系硕士研究生范家豪为论文第一作者,通讯作者为上海交通大学马卓晨副教授,韩冰助理教授,及王贺升教授。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202309424
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




















