中科院乔红院士:类脑智能机器人:理论分析与系统应用
脑科学被视为理解宇宙、自然与人类关系的“终极疆域”,人类从未停止对人脑的探索,以及对其运行机制的模仿。其中,类脑智能机器人作为融合了视觉、听觉、思考和执行等能力的综合智能机器人,它能够以类似于人脑工作的方式运行。
传统的关节连杆型机器人由于在单一任务中的高精度作业,在生产线上得到了广泛使用。随着制造业和服务业的快速发展,对机器人的综合性能的要求越来越高。许多类型的仿生机器人已经被研究来实现类似人类的运动控制和操纵。为了让机器人更好地模仿人类和动物,中科院自动化所乔红院士团队提出了一条从内部神经机制到外部躯体结构的研究思路。基于这一想法,构建了一个包含视觉认知、决策、运动控制和肌肉骨骼结构的类脑智能机器人系统。
团队对类脑视觉认知、决策、运动控制和肌肉骨骼系统的前沿研究进行了综述,并建立了两套软件系统和相对应的硬件系统,旨在验证并应用于下一代类脑肌肉骨骼机器人。该项研究以论文(Brain-inspired Intelligent Robotics: Theoretical Analysis and Systematic Application)为题发表于MIR 2023年第一期期刊中。
论文地址:https://link.springer.com/article/10.1007/s11633-022-1390-8
机器人被誉为"制造业皇冠上的明珠",已经成为衡量一个国家科技综合实力的重要指标。自1962年第一台工业机器人Unimate上线以来,人们将大量的机器人系统投入到了工业生产线上,代替工人完成重复性、高风险、高负荷的任务,从而不断为制造业企业创造巨大的生产效益。随着机械工程、控制和人工智能技术的不断进步,国防、医疗、先进制造业等众多应用领域都对机器人应用提出了迫切的需求。
然而,现有机器人系统的性能仍然受到传感器精度、系统重复精度和辅助机械性能的限制。提高机器人的性能需要机械工程、材料科学、控制理论、智能芯片、信息科学等多学科的协同发展,而由于其所需投资较大,开发周期较长,机器人的广泛应用也大大受限。
相比之下,人类在感官反馈绝对精度低、行为控制和分散计算能力有限的情况下,可以实现比每个身体单元独立完成能力更加出色的整体性能。这主要得益于人类能够整合多个脑区的信息,并且能充分利用身体结构的优势。因此,通过模仿人类的生理结构、行为特征、智能原理和控制机制,开展类脑智能机器人研究,对开发新一代机器人具有重要意义。
▍类人机器人研究的两种思路
长期以来,人们一直把人类作为改进机器人的参考标准。目前,根据研究出发点的不同,类人机器人的研究工作主要包括两种思路。第一种思路是让机器人模仿人类的功能。基于对人类行为的观察和分析,这种研究思路旨在赋予机器人完成人类工作的能力。例如,目前使用最为广泛的关节型机器人是由刚性连接、齿轮箱、关节减速器和辅助工具组成。虽然关节机器人在外观和执行原理上与人类有很大不同,但在复杂传感器和专用控制程序的帮助下,它们可以代替人类完成特定的操作任务。
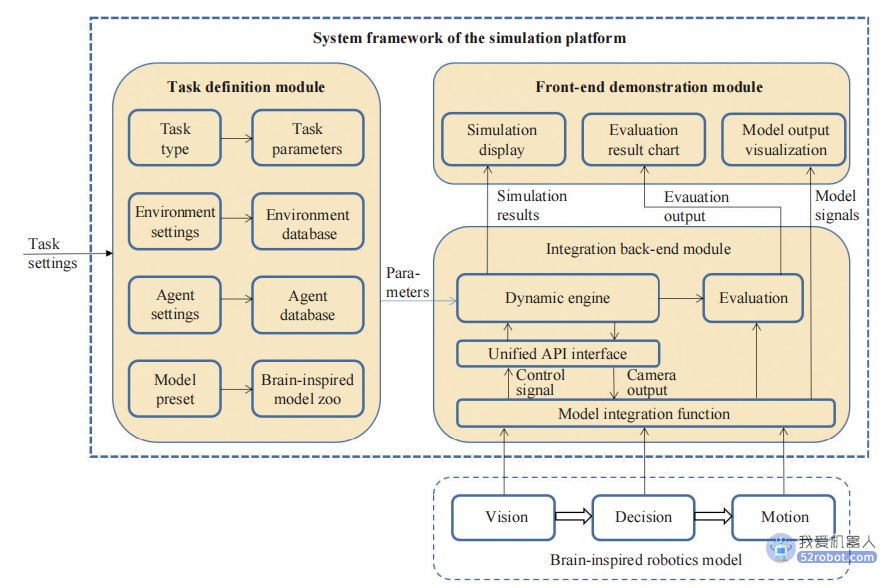
软件平台系统框架图
另一个典型的例子是具有与人类外观和功能类似的仿人机器人,旨在从外到内模仿人类机制。其代表性的研究成果包括本田汽车公司的ASIMO机器人(1997C),北京理工大学的BHR机器人(2000C),意大利理工学院的iCub机器人(2008C),以及波士顿动力公司的Atlas机器人(2016C)。这些机器人通常具有双足运动能力,引入人工智能算法后,也具有初始的自学能力和对复杂任务的适应能力。
研究人员利用高度冗余的执行器,让仿人机器人具备能比拟人类的灵活性;然而,这同时也带来了控制器设计方面的挑战。人们提出了许多数学算法来控制具有高冗余执行器的仿人机器人,例如为实现稳定双足运动所提出的零力矩点、捕获点和中枢模式发生器算法,为实现多样化操作所研发的无模型强化学习、基于示教的模仿学习算法等。虽然这些方法仍处于研究的早期阶段,但这些方法成效显著,有望拓宽仿人机器人的应用范围。
第二种思路是以模仿人类的核心和基本机制为方向,以此形成了对类脑智能机器人的研究。类脑智能机器人是参照人类视觉认知、决策、运动控制和肌肉骨骼系统的神经机制和结构特征,从内在机制到外部结构对人类进行模拟。
类脑智能机器人的研究通过整合脑科学、人工智能和机器人学等多个学科,旨在建立具有高计算效率和通用智能的类脑信息处理算法,研发具有高度灵活性和鲁棒性的肌肉骨骼系统,为下一代机器人的发展奠定基础。在过去的几年里,出于探索人类的本质和治疗精神疾病的迫切需要,美国、欧盟、日本、韩国、加拿大、澳大利亚和中国等多个国家都提出了脑计划,以促进脑科学和类脑智能的研究。
▍软硬件结合的综合系统
作为类脑智能不可缺少的一部分,类脑智能机器人是一套软硬件结合的综合系统,对验证研究成果具有重要意义。许多研究团队在类脑算法、脑神经形态芯片和肌肉骨骼机器人系统方面进行了初步研究,并取得了许多阶段性成果。可穿戴外骨骼系统作为肌肉骨骼系统的典型应用,是近年来的一个热点。
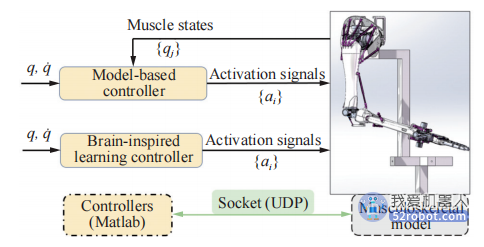
仿真系统控制框图
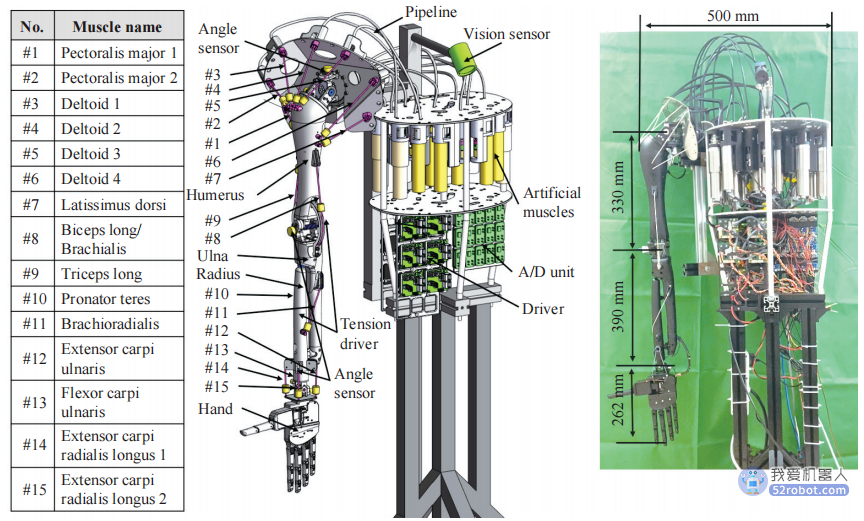
硬件平台的结构设计和肌肉分布图
研究者们利用基于区域的控制和交互式框架、人在环路控制、势垒函数设计等有前景的技术和框架,来改善可穿戴外骨骼系统在辅助行走和负重工作中的性能。这些研究工作对于肌肉骨骼的应用具有重要意义,代表着使用仿生可穿戴外骨骼系统进行人机交互的最前沿研究。由于引入了人类的内部运作机制,类脑智能机器人有望实现与人类的共鸣,并实现与人类伙伴的深度合作。
与以往脑启发机器人的相关综述相比,本研究介绍了脑启发机器人研究链上的前沿工作,包括指导神经机制、脑启发算法设计、软件平台构建和硬件系统开发。特别介绍了系统软硬件集成的最新进展。本文的其余部分组织如下。第二部分介绍了视觉、决策、控制和身体结构中的核心神经机制以及相应的脑启发算法。第三部分介绍了系统的软硬件集成。脑启发机器人仿真平台集成了视觉、决策、运动控制等方面的脑启发算法,为不同领域的研究人员提供了有效的工具。该硬件平台旨在模拟人类肌肉骨骼系统,提供一个物理系统来验证脑启发算法的性能。第四部分对研究进行总结和总结。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









