图像处理与机器人相结合的优势及案例研究

“我们在工厂线上引入了机械臂,但工作的定位精度很难,效率也没有我们想象的那么高。你不能去人性化设置。”
当引入工业机器人手臂的过程结果未按预期出现时,您是否遇到过这样的问题?
工业机器人已经在许多工厂中得到采用和普及,但随着它们的普及,各种问题也越来越明显。在这里,我们将解释发生了什么样的问题,并介绍与图像处理技术的组合来解决这些问题。
01 One
工业机器人普及带来的问题
一些企业在引入工业机器人时并没有达到他们最初预期的效果。关于工业机器人普及带来的问题,主要介绍以下三点。
(1)根据工件改变夹具和设置;
在一条生产线上处理多个工件时,可以想到以下两种方法。
• 在不改变机器人移动方式的情况下使用夹具调整工件;
• 在不调整工件的情况下更改与机器人如何移动相关的设置。
如果要在一条生产线上无休止地生产一种产品,则没有必要,但在小批量、多品种生产的情况下,需要频繁更改设置。
如果机器人能够自动检测工件的类型并相应地切换预编程的运动,它将消除每次设置更改的需要。
(2)每次都需要校准;
即使搬运相同的产品,通过机器人搬运时,每个产品的形状可能会有很大差异,并且每次在生产线上都很难将产品固定在同一方向上。
在这种情况下,需要人工干预并进行校准,以使机器人能够正确识别和处理它,这导致工作效率下降。
如(1)所示,如果机器人本身能够识别产品的方向和变化并进行相应的自动调整,则无需人工干预即可提高生产效率。
(3) 需要在工作场所进行培训的项目数量增加。
如图(1)和(2)所示,在引入机器人之前无法进行的设置更改和校准工作变得必要,并且需要对负责处理机器人的生产线的现场人员进行新的培训。
每次我们微调机器人的设置或在同一条生产线上运行新产品时,我们都必须创建一份教育手册,以便负责人能够理解并继续前进。虽然我们引入机器人是为了节省劳动力,但如果由于引入机器人而增加了工作岗位,我们就无法达到最初的目的。
02 Two
结合图像处理的优点
通过利用图像处理技术,可以识别产品的错位和个体差异,并自动区分不同类型的产品。
在引入新机器人时,或者当有已经引入的机器人时,结合新的图像处理技术具有以下主要优点。
1. 无需整理产品;
2. 一条生产线,适用于多种产品;
3. 可以同时执行多项任务。
这些优势大大减少了人们在生产线上的工作量,从而提高了工作效率和生产力。
(1) 无需组织产品;
过去,人类必须根据产品错位和个体差异进行调整,以便机器人能够很好地处理它们,但与图像处理技术结合后,这不再需要。
图像处理可以检测产品错位和个体差异,因此如果创建一个程序以根据预先检测到的内容调整机器人的动作,则可以在没有人工干预的情况下进行生产。由于不用一个个停线,人力可以调配到其他地方,是效率的显著提升。
(2)兼容多种产品;
在一条生产线上生产多种产品类型时,需要使用夹具进行调整并更改机器人设置。图像处理的引入也使得产品分类成为可能,因此可以在没有人为干预的情况下任意更改设置。
特别是,对于小批量生产多种产品的生产线,可以消除过去需要的设置更改所需的时间。
(3)可同时完成多项任务。
引入图像处理的好处不仅限于针对每个产品进行调整。例如,如果在之前的工序中进行了目视检查,则可以取消该检查并在引入图像处理的工序中进行检查。
在确认产品类型和位置偏差的同时,可以根据适当的检查点进行外观检查。
03 Three
人与图像处理机器人的比较
在这里,我们将使用图像处理来比较人类功能和机器人功能。检查表格以了解每个部分的作用。
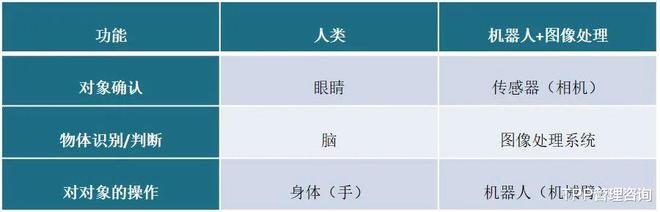
通过这种方式,可以通过机器人+图像处理系统实现与人类正在做的每个动作相对应的部分。
此外,虽然不可能完全消除人为错误,但机器人的特点是,如果正确设置并定期维护,它们可以执行相同的动作而不会出错。
04 Four
图像处理机器人应用实例
从这里开始,我们将介绍应用图像处理机器人时的应用示例。如果能够在想象它的同时检查如何在公司的生产线上使用它,那就太好了。
(1) 准确抓取不同位置的物体;
通过图像处理适当地识别生产线上不同位置的物体,可以用机械臂准确地拾取它们。
比如糖果厂在打包盒子的时候,需要准确的捡起来,适当的打包,但如果盒子的位置和方向每次都是人定的,那么引入机器人就没有意义了。图像处理机器人的使用大大提高了效率,从而提高了生产力并降低了成本。
(2) 来料准确分拣;
当同时在一条生产线上运行多个产品或不同尺寸的产品时,图像处理技术也很有用。
通过预先输入可分类的特性,自动进行分类,不仅可用于多种分类,还可用于次品的分类。例如,它有时用于螺丝等工具,这些工具通常是小批量生产的。
(3) 将螺钉拧入未定位的物体中。
图像处理不仅用于分类,还用于作用于对象。
即使将螺钉拧入产品中,如果定位不正确,螺钉也可能被拧错位并损坏。然而,通过使用图像处理驱动螺钉,机器人可以确定位置并驱动螺钉,而无需将螺钉一一定位。
此外,通过将检查与图像处理相结合,可以根据检查结果自动响应,因此可以应用于各种生产线。
05 Five
用于图像处理机器人的图像处理技术

到目前为止,我们已经介绍了结合传统工业机器人利用图像处理的各种优势和方法。
那么,究竟采用了什么样的图像处理技术,让机器人能够区分图像呢?这里描述了三种典型的处理方法。
(1) 位置修正;
在向机器人发出指令时,需要以机器人能够识别的形式准确地传达产品的位置。然而,为了做到这一点,人必须定位产品。
通过使用图像处理位置校正技术,即使产品处于错位位置,也可以从坐标轴和旋转角度的视点进行位置校正,并传送给机器人。根据传输的位置校正信息,机器人只需要像以前一样移动,消除了由于位置校正而导致错误处理的可能性。
由于根据参考图像来校正当前图像的位置是很常见的,所以让我们从准备参考图像开始。
(2) 密度校正;
通过校正颜色和密度的细微变化,机器人可以更清楚地掌握图像的位置和方向。有一些方法可以简单地将图像分成两种颜色,黑色和白色,也有将微妙的色调分成几个强度级别的方法。
此外,如果需要处理彩色图像,也可以改变每个颜色分量的阴影。通过使用这些校正,不仅可以改善位置和姿势,还可以改善产品的分类和缺陷产品的检测。
(3) 倾斜校正。
即使产品的位置可以通过位置校正来确定,但当它倾斜时,可能无法用手臂正确抓握或拧入螺钉。在这种情况下,倾斜校正是有效的。通过将通过灰度校正等澄清的图像与模型图像进行比较,可以检测倾斜程度并校正机器人的运动。
以这种方式,通过结合各种图像处理技术,正在开发生成信息的技术,使机器人能够执行预期的功能。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")








