机器人会“下意识”扶墙!人形机器人站立和行走很难么?
人形机器人的站立和行走时至今日依然无法和真人相媲美,当机器人走的不那么稳时,一项新研究可以让机器人先扶墙保持平衡。

法国洛林大学的研究人员开发了一种“Damage Reflex”系统(损伤反射,又名 D-Reflex),当机器人的一条腿断了时,人形 TALOS 机器人会将自己靠在墙上,就像一个刚刚失去平衡的人一样。
根据研究人员的介绍,该机器人搭载基于神经网络的系统,利用其经验(882000 次训练模拟)快速找到墙上最有可能提供稳定性的点。机器人不需要知道它是如何损坏的,并且可以像人一样快速伸出手扶住墙。
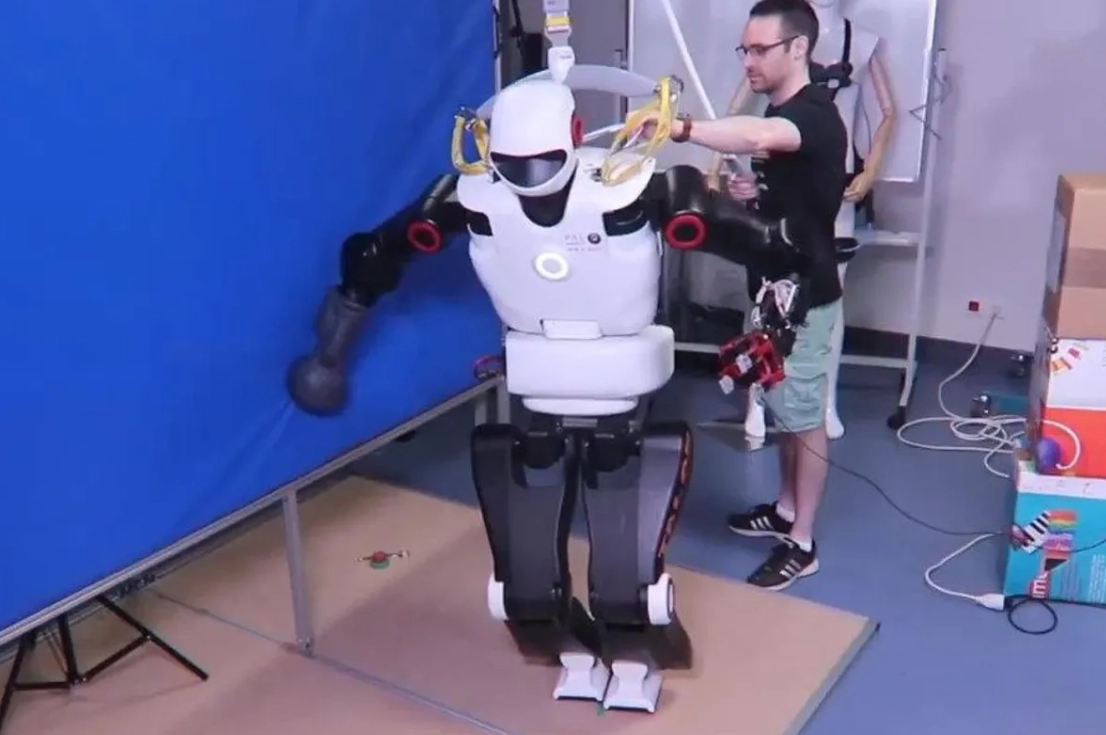
不过,该机器人无法像人一样一瘸一拐地扶着墙走,目前只能扶着墙保持静止,并等待救援。
研究人员希望制造一个在移动中有用的系统,并设想机器人可以在即将跌倒时抓住椅子和其他复杂物体,从而节省更换机器人的成本。该研究成果已于今年早些时候发表在 IEEE Robotics and Automation Letters 上。
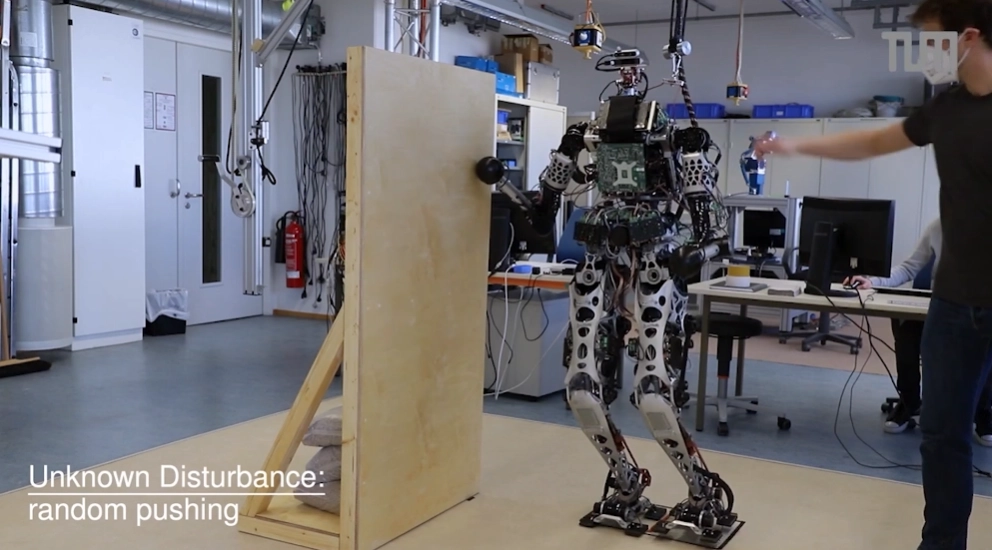
今年早些时候,慕尼黑工业大学推出了另一种可以扶墙的机器人,名为 LOLA,可以在不平整地面上行走,还会“下意识”扶住两边的墙壁,两项研究目前都在进行中,希望能有进一步的突破。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")








