给船舶“搓澡”的机器人“海鮣号”远洋船舶清洗机器人在沪研发成功
为什么要给远洋船舶“搓澡”?
长期行驶在海上的远洋船舶
看起来“威猛帅气”
但也是有“难言之隐”滴~
由于海水浸泡
水下部分的船体表面
会附有贝类、藻类生物及生出锈斑,
不仅会严重影响船舶的
航行速度和使用寿命,
还会增加油耗。
据研究统计,世界各国每年因海洋附着生物造成的经济损失就超过百亿美元,因此定期清洗非常重要。目前船体附着物清洗手段较为落后,航运业对于先进的船舶清洗机器人有着迫切的需求。

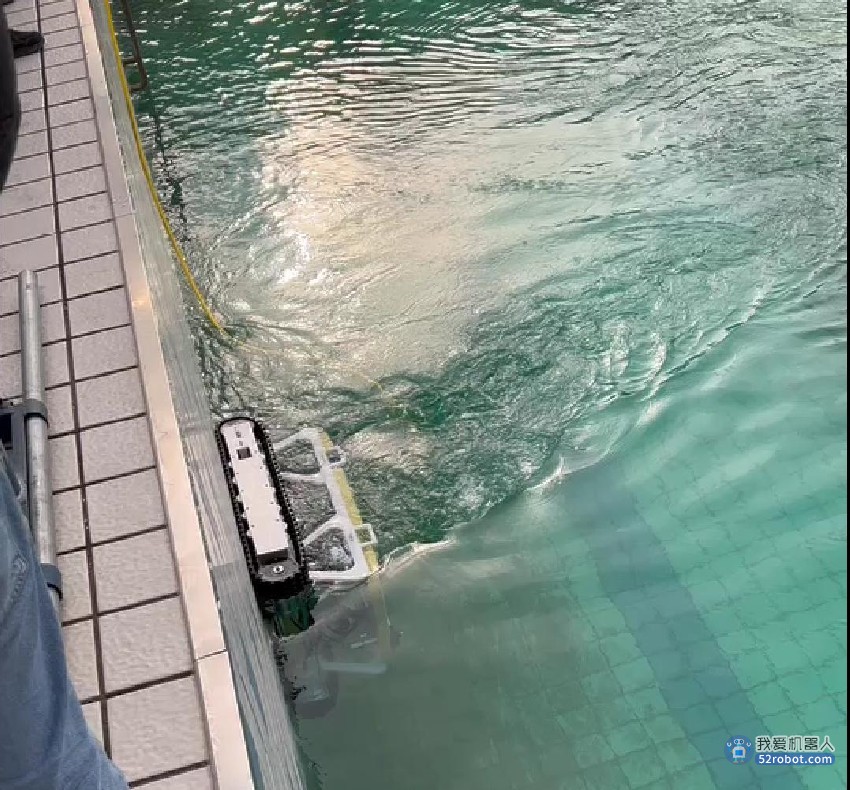
在市科委的支持下,由上海海事大学牵头组成科研团队,面向国家航运业发展的重大需求,针对现有船体清洗装备及技术难以满足船舶清洗保养需求的现状,从船体清洗装备和关键技术需求出发,历经多年的产学研联合攻关,重点开展船体清洗机器人平台和清洗工具的优化设计研究,突破了浮游+爬行模块化重构技术、水下负压吸附机构、水下空化射流清洗工具等一系列关键技术,研制了“海鮣号”远洋船舶清洗机器人系统。


“海鮣号”作为国内外首次采用浮游+爬行模块化重构技术的船体附着物清洗机器人。其中浮游+爬行模块化重构技术使机器人既能以浮游模式完成清洗任务,也可以通过自主设计的柔性履带底盘,以爬行模式进行清洗作业,能够轻松完成前后、转弯及原地旋转运动,实现清洗机器人高机动性和高稳定性,满足不同结构类型船舶的清洗需求。
该机器人还采用了大功率推进器与负压吸附结合的自适应吸附技术,提高了机器人在复杂船体表面作业时的吸附能力;采用无损、高效的空化水射流技术,设计自旋转空化盘,提高了附着物清洗效率。
经过大量的实验应用,获取了明显的实船清洗效果,机器人抗流能力达到2节以上,最大爬行速度0.7m/s,最大清洗能力达到每小时500m2。目前已实现“多用途刷船机器人设计方案和制造技术”成果转化1项,转让费达885万元。

据悉,项目研制过程中为了实现船体表面爬行时的高精度的导航定位能力,自主设计了基于伺服技术的履带驱动电机,可以精确控制履带运动并获取机器人的运动状态,并与惯性测量系统(IMU)提供的姿态数据进行融合,最终获取了机器人准确的位置信息。
项目组还基于深度学习技术设计了船体附着物识别软件系统,能够在清洗前获取附着物的污染情况,并在清洗后对清洗效果进行评估。
此次项目研制的新型水下清洗机器人促进了船舶清洗领域的科技进步,对上海水下机器人产业发展具有明显的推动作用。同时,项目研发成果的推广应用,对上海国际航运业中心建设具有积极的促进作用。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















