全球预售10台!能跑会跳不怕摔,西木科技人形机器人开放平台发售
机器人行业近年来一直在全社会关注前列,特斯拉、小米的行为,明显激发了不少研究者对人形机器人这一细分市场的兴趣。
作为“最难做的机器人”,双足仿人机器人凝结了机器人技术的最高水平,在机械构造、驱动和控制的研究复杂程度都远高于现有的多类型机器人。如何加快人形机器人学教育与科学研究,全世界的开发者们都在为此绞尽脑汁。
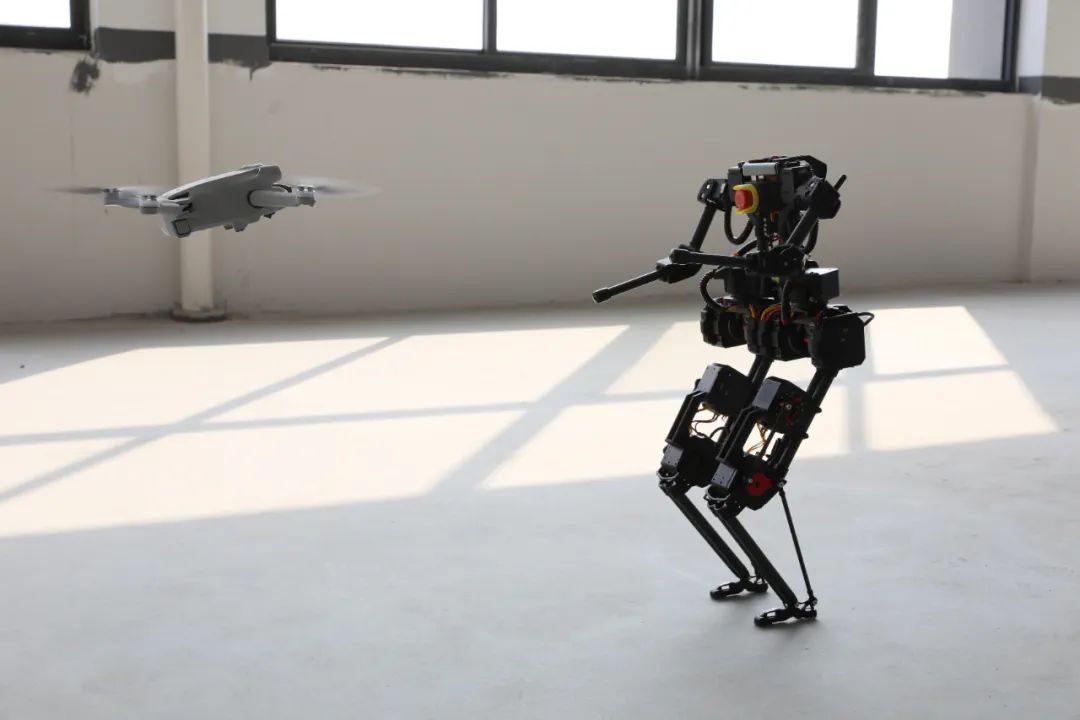
近日,机器人大讲堂发现了一个有趣的高动态人形机器人平台,这个名为BRUCE的机器人能陪伴科研人员在机器人学的研究工作中,像个孩子一样,在一次次摔倒、爬起的过程中不断成长,这种理念无疑让人眼前一亮。

▍不怕摔的“孩子”
从外观来看,BRUCE像是一个人类小孩子,高70cm,重4.8kg,这与国内许多人形机器人研发商在体积上追求与人类同步有所不同,但优势却非常可观。

(身高与人类小朋友相当)
因为一个和成年人差不多大小的机器人,虽然巨大的部件带来了更强的动态性能,也有着更大的自重和力量,这容易导致研发过程中围绕着机器人开展的许多调试工作,大多伴随着不可控的安全风险。
例如身高1.8m,体重80kg的Atlas,在实验室中通常都需要配备额外的辅助设备。近日高1.72米,体重为56.6千克的Optimus在公开演示中,更是需要由3个大汉将其抬起,这对于开发者而言其实并不算友好,许多开发者自我调侃,进入人形机器人实验室相当于日常撸铁。

身高体重过于像人造成的另外一个问题则在于怕摔。
由于人形机器人产业链目前并不算成熟,在部件的定制与采购上非常麻烦。一次意外摔倒,或者一个程序BUG,就可能导致部件损坏难以维护,需要等待较长的部件定制生产周期,目前国内外许多高校都有专门的仿人机器人摔倒保护研究。
在机器人变得越来越商业化的今天,机器人跌倒的领域需要更多的探索,因为它总有摔倒的时候。但由于双足形态天然的不稳定特性,要想让人形机器人像人类一样保持平衡不摔倒远没有那么容易。
但是正如加州大学洛杉矶分校的Dennis Hong教授曾说过 : "If your robot doesn't fall down and doesn't break, you don't get to learn anything." 如果害怕机器人跌倒和摔坏、害怕这些风险和困难,我们就会在机器人研究的道路上止步不前。
Dennis Hong教授是世界著名机器人学实验室RoMeLa的主任,也是BRUCE的创造者张晓光博士的导师,因此我们在BRUCE机器人上,除了惊叹它出色的动态性能,也可以很明显看到这种十分出色的鲁棒性,更通俗一点的说法则叫“耐摔”特性。

▍“不怕摔”背后的秘密
机器人大讲堂认为,高鲁棒性不仅得益于BRUCE机器人小巧的身躯,更是得益于三点技术特性。
首先,得益于整体结构设计的仿生与拓扑优化,BRUCE机器人做到了非常紧凑结实。
我们从官网放出来的整体设计架构模型可以看出,BRUCE机器人骨盆、髋关节等支撑关节应该都进行了仿生优化设计,使得BRUCE有一副如同运动健儿一般的身躯,这意味着不同“摔倒”的姿势下对于BRUCE机器人本体部件的冲击力都相对更小。

可以从一些小细节中很明显看到设计者的用心,例如在BRUCE的膝关节处,有一个类似“膝盖”的结构件,可以说是拓扑优化结果和可加工性的极致结合,而骨盆结构同样非常有趣,相信一些敏锐的朋友已经发现了:它们恰恰和我们人类的骨盆有些相似。
“这其实是非常合理的一个结果,因为作为一个仿人形的机器人,BRUCE在骨盆处的载荷模式和人类非常近似,而亿万年来,生物的不断进化所带来的形态和结构的改变,也正是大自然所进行的一场庞大而精细的拓扑优化。”张晓光博士对机器人大讲堂解释道。
其次则来自于碳纤维骨架结构。如何均衡机器人自重和输出扭矩一直是学术研究的重要方向,在保证强度的前提下,实现全身极致的轻量化无疑是衡量一个机器人性能的关键指标。
机器人大讲堂从张晓光博士这里了解到,目前BRUCE机器人全身由碳纤维骨架结构制成,这使得其最终只有4.8kg的自重。但由于所有零件历经5年无数轮次的深入拓扑优化,能够在满足小巧轻便的同时满足机器人开发的各类要求,方便开发者们高效轻松而安全地推进科学研究。
拓扑优化带来的效果,我们从张博士处得到一个很直观的数据:前面提到的“膝盖”零件,是人形机器人腿部最重要的结构件,但在BRUCE身上,它的重量也仅有34.5g,仅占整条腿重量的2%。
为了实现最大化的动态特性,我们了解到,在BRUCE的踝关节处,BRUCE机器人使用一套两级连杆方案进行驱动去耦合。最终小腿和脚的重量加起来也只有130克,而整条腿的转动惯量相较于直接的耦合设计降低了近四倍。目前,BRUCE使用一块3000mAh的电池时,续航时间可达20min。
第三则来源于高度模块化的设计。模块化程度越高维修越方便自不用多说,对于人形机器人开发者而言,为了保证整体结构和输出扭矩的稳定性,模块化设计本身就是一件难度较大的事情。
BRUCE机器人做到了不包含头部全身就有16个自由度,其中下肢有10个自由度,下半身的10个自由度全部由Westwood Robotics的Koala BEAR本体感知驱动器模块进行柔性力控,赋予了BRUCE优异的动态运动能力。这意味着BRUCE能够完成非常多的人形机器人动作,却又能维修起来也十分方便。
在BRUCE的髋关节则设计了一套非常巧妙的仿生索驱传动机构。这套传动系统的结构就像是人类的关节,由骨骼提供支撑,依靠交叉韧带进行高效传动。据了解,相较齿轮和连杆等方案,索驱方案不仅轻量、高效,而且结构紧凑,成本低廉。
▍更多技术细节解析
据了解,BRUCE还是目前世界上为数不多的几个能够自由跳跃的人形机器人之一。

跳跃运动由于其着地点的离散性和发力的突发性和爆发性,使拥有跳跃运动模式的仿生机器人具备很强的越障和环境适应能力。
由于跳跃类型的不同,连续跳跃,起跳、腾空、触地等多运动和形成一个复杂的非线性混合系统,目前的研究多集中在连续弹跳运动动态稳定性、非线性动力学及控制理论方面,该领域的研究空间还有很多。
而BRUCE为了满足跳跃这一研究开发条件,由Koala BEAR驱动器提供强大爆发力和动态性能保障,配合西木科技独有的8Mbps超高速通信和液态冷却技术,使其能够实现良好的散热性能,完成强大而稳定的动态输出。
同时,BRUCE还会根据自身的惯性质量分布,实时优化起跳和落地的姿态,使得BRUCE不仅能够实现类似人类的先蹲后跳以及下蹲缓冲,而且也能像人类一样通过改变身体的倾斜来补偿转动惯量。
我们从动图中可以观察到,即便在空中,BRUCE也能够根据身体的动量反馈来实时更新落脚点的位置,从而能够更稳定地落地。
同时我们还注意到,BRUCE顶端配备了一个急停按钮,在官网的介绍中,这个急停按钮还支持无线操作,这意味着在某些紧急情况下,开发者们可以使用遥控器让BRUCE的所有下肢驱动器进入阻尼保护模式,大大增加了安全性。
部分经验丰富的开发者告诉机器人大讲堂,无线急停开关除了能保障紧急状况下的安全,还有一个优势在于能够极大方便调试。
▍初衷与开源
之所以将人形机器人做到了如此极致,是因为从萌芽时刻开始,BRUCE的研发团队便将他定位成一个帮助促进全世界的机器人学教育与科学研究的开放平台。
BRUCE全名为Bipedal Robot Unit with Compliance Enhanced,这个开放平台由Westwood Robotics (西木科技)与加州大学洛杉矶分校的RoMeLa实验室联合开发,从2017年开展至今已经5年了,其研发初衷就是设计一款可靠、功能强大且易于开发,能为世界各地的研究人员提供出色的动态性能的机器人平台。
正如Westwood Robotics创始人张晓光博士所提到的:“机器人学是一门横跨众多领域和科研方向的庞大综合体,而人形机器人是其中最复杂的一个代表性课题。我始终坚信,人形机器人的发展和进步,离不开全世界各个相关细分领域的研究者的共同努力。”
机器人大讲堂了解到,BRUCE开源项目目前正在最后完善阶段,或将于2023年第二季度正式启动,向全球的机器人开发者免费开放,从而让BRUCE 能够为全球机器人研究的进步以及全球范围内更好的合作做出贡献。
目前,BRUCE的首批预售现已开启,全球限量10台。首批用户将能够抢先加入BRUCE的开源项目,并获得一对一培训和技术支持。
为了鼓励开发者探索BRUCE平台的特性,西木科技为BRUCE的首批用户特别设计了五个非常有趣的迷你项目。购买者可以选择最感兴趣的一个方向进行开发尝试,如果在一年内完成,将获得高达5000美元的现金奖励。
这五个项目分别是
A. 直膝行走+长续航
B. 单腿跳并换腿
C.以1m/s的速度奔跑
D. 从平台上跳下并后空翻
E. 180度原地转向跳跃

▍关于西木科技
西木科技成立于2018年,总部位于洛杉矶,是一家致力于机器人学本体感知驱动器以及柔性力控动态机器人系统的创新科技公司,其核心团队成员均来自加州大学洛杉矶分校的Robotics & Mechanisms Laboratory实验室(RoMeLa)。其博士科研团队拥有多年的先进本体感知驱动器以及人形机器人、四足机器人、六足机器人、机械手与机械臂等多种尖端动态机器人系统的开发经验。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















