浙工大这项柔性触觉手套技术让机器人“盲眼识物”
触觉是人与外界事物交互时的重要感知功能,弥补了视觉在复杂环境状况下无法精准识别的缺陷。以柔性触觉传感器为媒介,赋予机器人精密的触觉感知能力,实现对外部复杂刺激的精确解耦与动态反馈交互,对扩宽机器人在微创医疗、神经假肢与人机协作等领域的应用至关重要。

柔性触觉手套在智能分拣上的应用
近日,我校机械工程学院吴化平教授团队博士后裘烨,联合机械工程学院梁利华教授,成功研发了能让机器人“盲眼识物”的柔性触觉手套,实现了从触觉感知到触觉认知的创新突破。
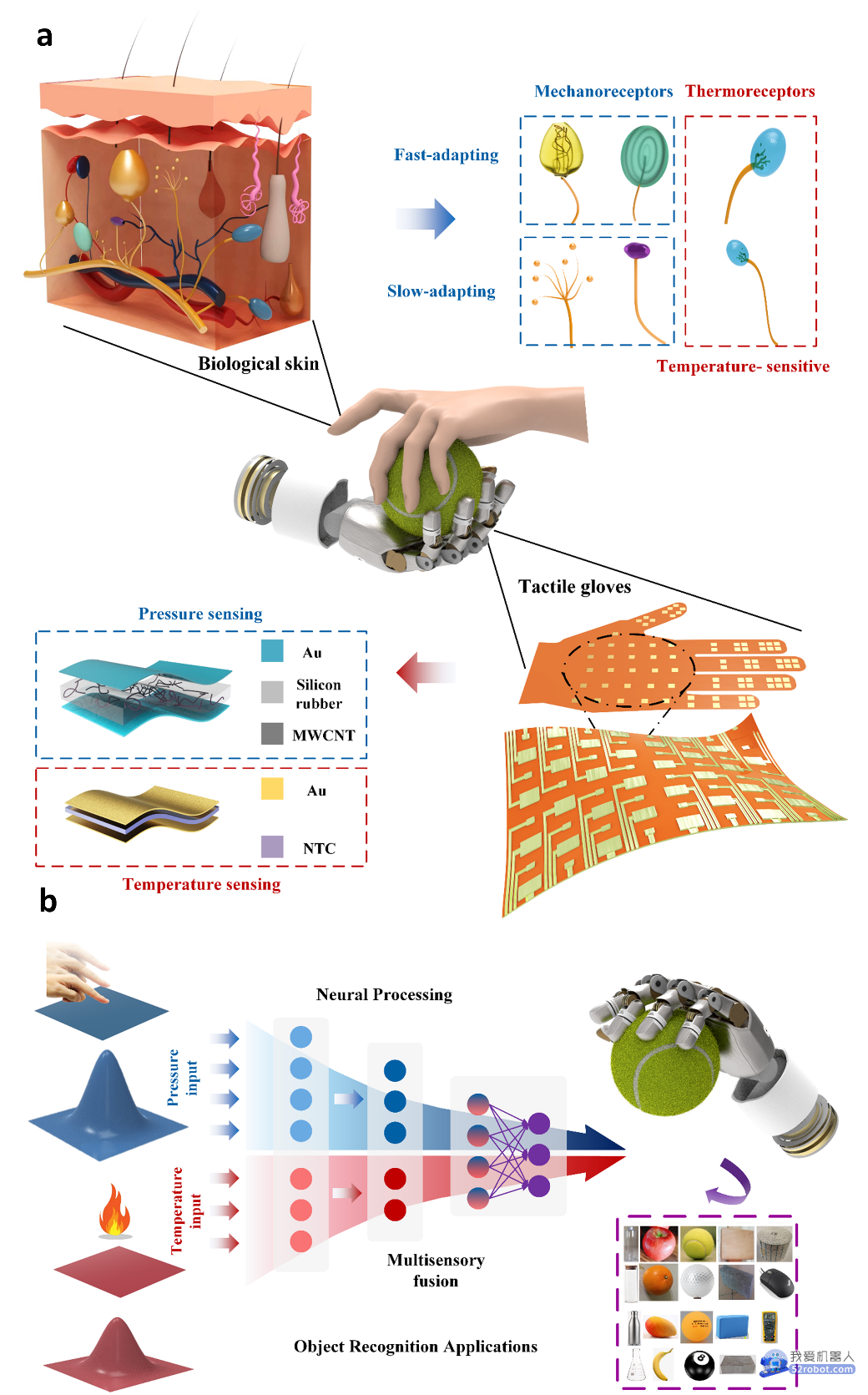
柔性触觉手套的设计思路
及其在物体识别上的应用展示
当前机器人用于物体识别或抓取的触觉感知技术,通常是基于压力感知反馈机理。然而,对于软硬度类似的物体,就无法通过接触压力来区分。而不同物体的导热率不同,要想提高识别精度,就要把物体的机械特征与热特征相结合。但具有多功能的柔性触觉传感器在结构和制造方案上往往比较复杂,且在感知多个刺激时会相互干扰。此外,大面积传感阵列的集成与采集仍然是一个巨大的挑战。
团队利用丝网印刷与点焊的工艺,制备集成有致密压力和温度传感阵列的柔性触觉手套(80个压力传感器和32个温度传感器),并提出多次测量解析法用于解决阵列电阻网络因高度集成化所引起的交叉耦合问题。利用此阻值测量方法搭建触觉传感阵列信号无线采集系统,该柔性触觉手套能实现对微小压力与温度变化的无线检测与映射。
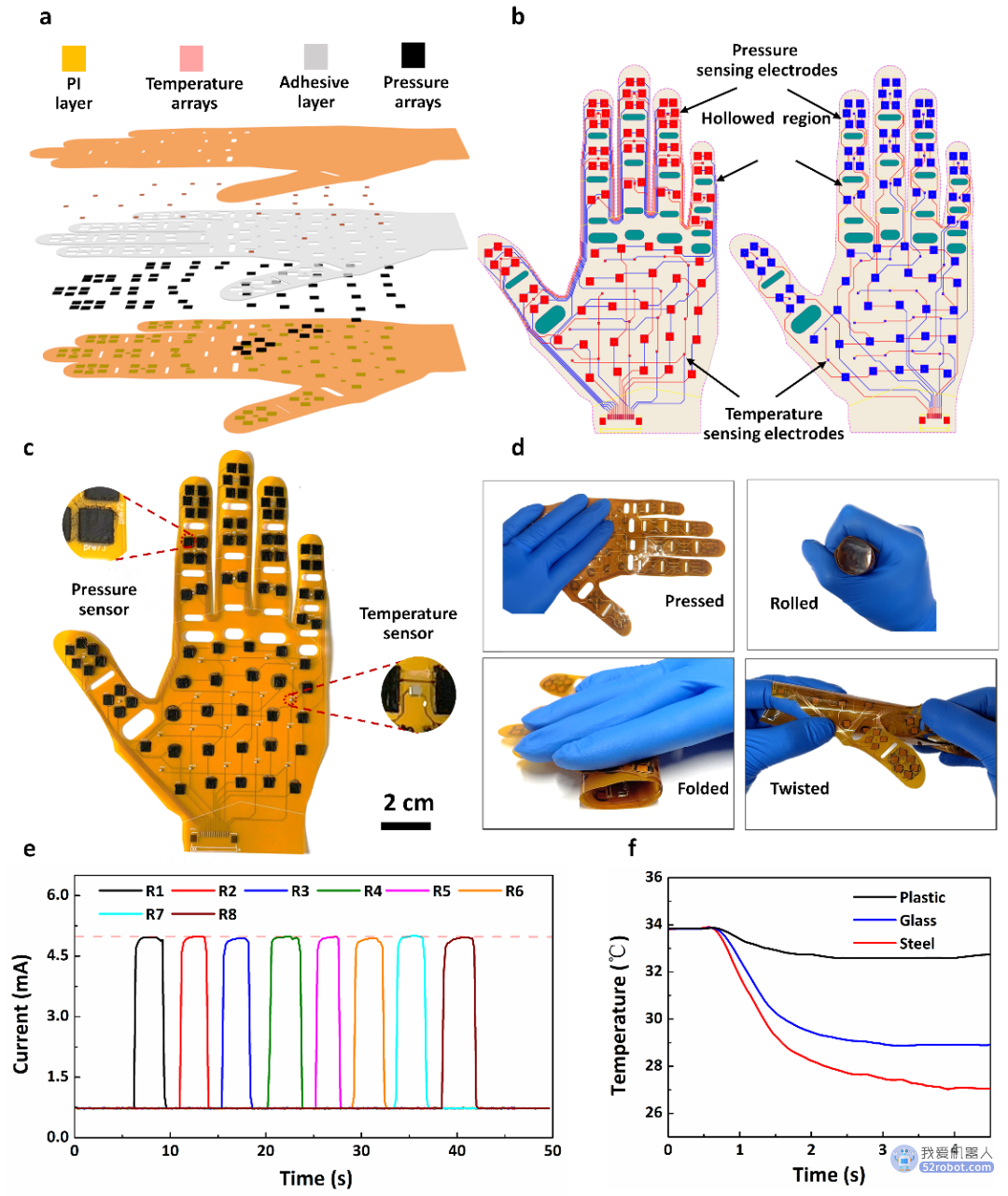
柔性触觉手套的结构设计及实物图
团队还研发了由触觉分布实时显示、数据采集以及物体识别模块构成的物体识别显示系统,通过触觉手套的抓握就能精确识别不同形状、大小和材质的物体(20种触觉数据库)。该柔性触觉手套可将压力与温度感知等多模态信息进行融合,并利用深度学习算法从而大幅度提高物体识别准确率。比如可将基于单压力触觉数据集的86.25%识别率,提高到基于多模触觉感知的95%识别率。
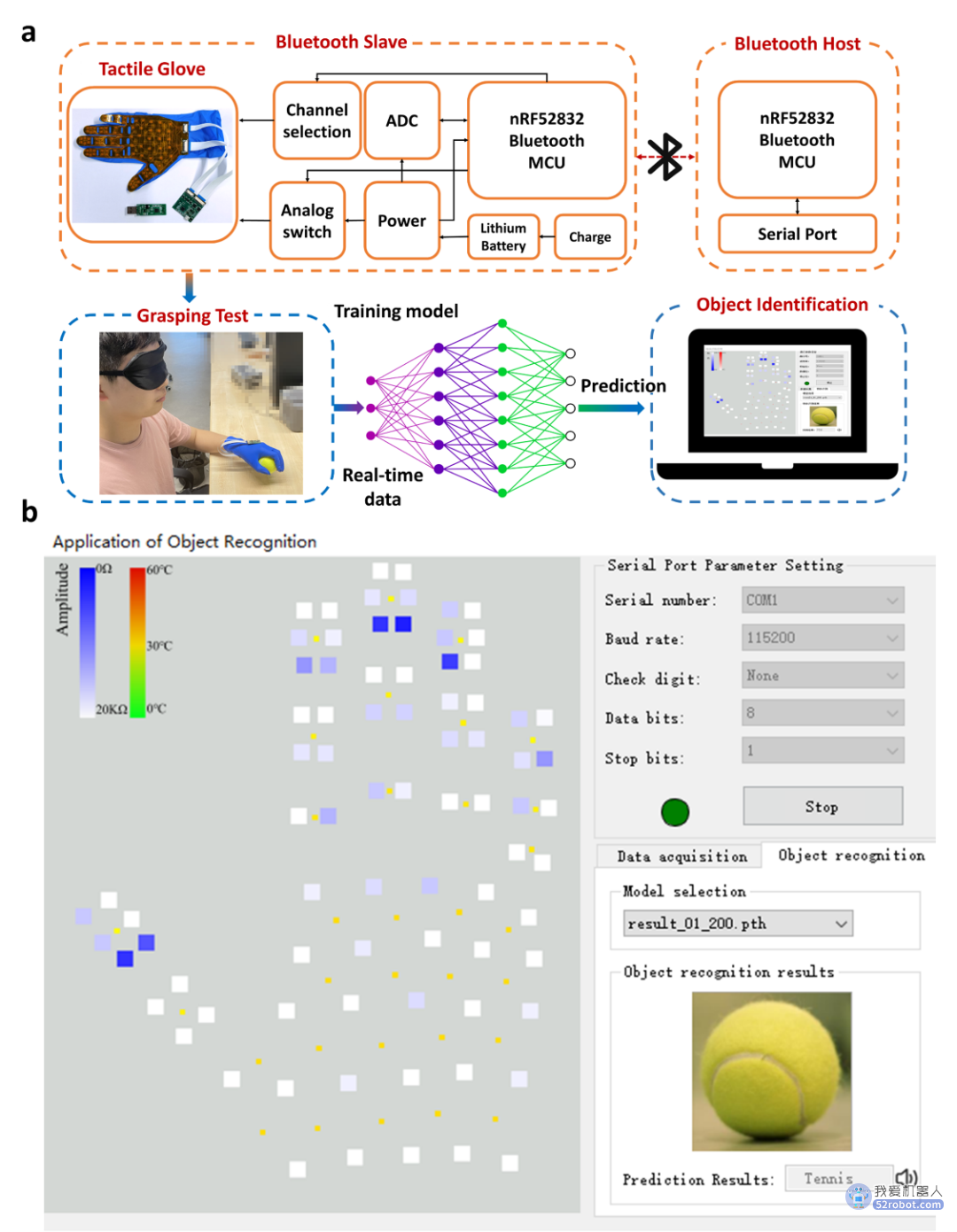
柔性触觉手套在物体识别上的应用
因此,该项研究工作对于视障人士的认知学习、神经假肢和虚拟空间的构建具有重要的现实价值,并有助于机器人领域的人机交互、自适应抓取和灵巧操作等应用的开发,在使机器人更准确地感知和与周围环境的交互上具有重大意义。
相关研究成果以“A multisensory-feedback tactile glove with dense coverage of sensing arrays for object recognition”为题,于2022年12月发表于工程技术与化学化工领域国际顶级期刊《Chemical Engineering Journal》。浙江工业大学吴化平教授和梁利华教授为论文的通讯作者,博士后裘烨为论文的第一作者。该研究工作得到了国家自然科学基金(11672269、11972323、12002308),中国博士后科学基金(2022M710129)和浙江省自然科学基金(LQ22A020009、LR20A020002、LR19E020004)等项目的支持。
论文信息
Ye Qiu, Zhiqiang Wang, Pengcheng Zhu, Binbin Su, Chang Wei, Ye Tian, Zheng Zhang, Hao Chai, Aiping Liu, Lihua Liang*, Huaping Wu*. A multisensory-feedback tactile glove with dense coverage of sensing arrays for object recognition[J]. Chemical Engineering Journal, 2023, 455, 140890.
全文链接:
https://www.sciencedirect.com/science/article/abs/pii/S1385894722063707
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









