从“机器狗”到“机器人”,中国人工智能发展到哪一步?
“最近的快乐都是二驴给的”,这个萌宠视频相信咱们不少人都在B站上看过吧。在去年举办的全国消防行业职业技能大赛,一只名为二驴的一岁搜救犬出圈火了。因为在比赛中途驴脾气发作,不听训导员命令,一心只扑上了旁边的护具。其实护具是赛方故意放那,专门诱惑搜救犬的。结果二驴果然狗如其名,又二又驴,没办法,只能放弃比赛了。那类似的视频在B站还有很多,警犬在地铁上因偷懒、嘴馋被群众抓包后一脸懵逼。

不过,咱们在被可爱的狗狗逗的开怀大笑的同时,有没有认真想过一个问题:即使这些经过严格训练的专业工作犬,还是无法摆脱动物本能。要是在执行任务时突然来这么一下,怎么令人放心呢?既然如此:那不妨用机器狗取代吧,既不用给食物,也不用训练,只要按照设置好的固定程序执行,几乎不会出错。而且只要充满电,体力无限,甚至可以去到很多工作犬无法到达的危险地带,如此岂不美哉。

这样的想法,现实中其实已经逐步实现了。比如上海防疫时就用了机器狗背着喇叭自动寻路广播,甚至前段时间,央视公开的我军日常训练中,用机器牦牛在高原驮运物资,甚至还出现了人狗协同作战的场景。

其实此类机械,学名叫做四足机器人,现在国内已经有不少企业在做了,甚至你打开淘宝,花一万多块钱就能买到一个能跳舞、能跟跑的机器狗,拴上狗绳走在大街上,你绝对是最靓的仔。
那么,这样的智能机器未来到底会给我们的生活带来怎样的变化?人工智能一直发展下去,真的有一天会像《黑客帝国》中那样反抗人类吗?带着这些问题,这次我有幸得到了杭州云深处科技公司,技术大佬的专业支持。

▲云深处产品
云深处科技是国内首家面向行业应用的智能四足机器人企业。目前已经和国家电网、南方电网等企业开展长期深度合作,在先进运动控制算法、智能环境感知和AI算法领域处于国际前沿。

▲云深处的电路巡线机器人
此次,云深处科技的技术人员耐心解答了我关于人工智能的很多疑问,所以咱们就以四足机器人,这个目前我们普通人能接触到的、最接近实用状态的人工智能体为例,一起看看人工智能的现状与未来吧。
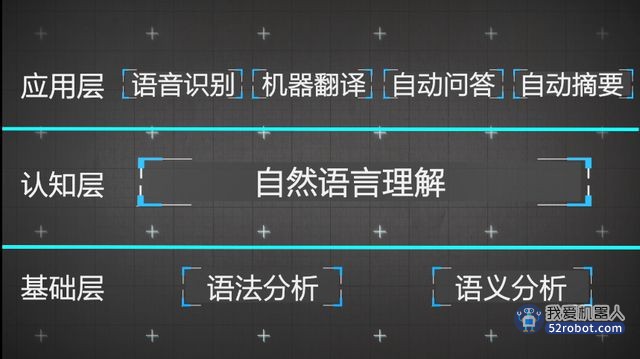
还是先给大家讲个故事,人工智能,简称AI——Artificial Intelligence,其实这个概念并不是近年来随着云计算、大数据兴起而新出现的。早在50年代,计算机刚被发明出来时,人们就在琢磨如何用计算机去做过去只有人才能做的智能工作。那最简单的就是让机器理解人的语言,以实现人机交流。
一开始想出的办法可能我们今天看来很搞笑:就是对一句话进行语法分 析和语义分析,将其拆解成文法规则。比如一句最简单的话:我爱中国。拆解成句法分析树,分为主语、谓语和句号,编写的规则就包括这么一大串。
当时人们以为,随着对自然语言语法概括越来越全面,同时计算能力的提高,总有一天计算机能完全听懂人类的语言。但这种思路存在两个大问题:一是把简单问题复杂化,“我爱中国”这样最简单一句话,文法规则就有这么一大串。
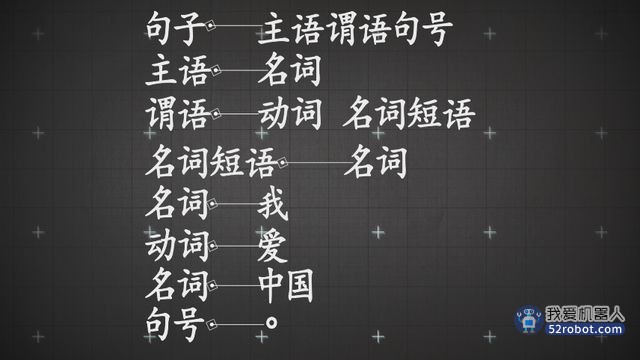
▲文法规则
根据计算机学家估算:随着语句长度的增加,计算复杂度将呈二次方关系激增,语言学家完全就来不及写嘛。而且就算能写出覆盖所有自然语言的语法规则集合,也很难用计算机来解析。因为很多自然语言的理解,是需要通过具体词义联系上下文的,这种计算又是另一个维度了,人们估计上下文有关的文法,计算难度将是语句长度的六次方。
其实这个也很好理解,比如下面一段话:你这是什么意思?没什么意思,意思意思;你这就不够意思了;小意思,小意思;你这人真有意思;其实也没别的意思;那我就不好意思了;是我不好意思。
中文学习时,即使我们人类的大脑都无法完全理解到底是什么意思,机器又如何能做到呢?毕竟我们自己就是目前已知的智能程度最高的“机器”。所以用这种基于语法规则,让计算机理解语言的“笨办法”很快就走不通了。
这里我们也不用笑话当时人们基于直觉的天真想法,即使现在也有很多人认为,要让机器完成只有人才能做的智能工作,就必须让其拥有类似我们人类的智能。而实践证明,最后真正实现“让机器读懂人类语言”的办法,是基于数学和统计学的算法:为自然语言,这种上下文相关的特性建立数学模型,机器本身并不需要真正理解一句话的意思,只要把文字顺序排列成一个人类能理解而且有意义的句子,然后显示给使用者就行。
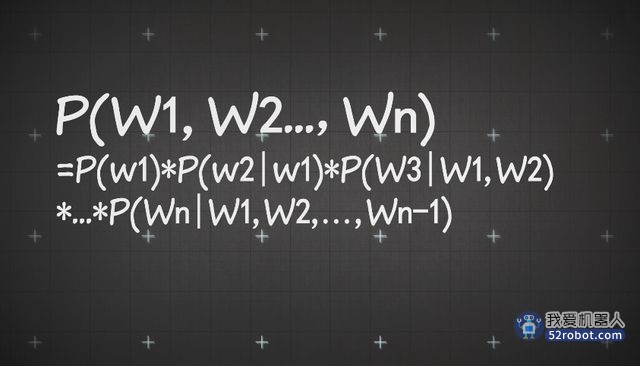
这个数学模型也很简单,假如S是一句话,由一连串特地排序的词W1、W2,一直到Wn组成,统计语言模型就是利用条件概率的公式,S这句话的表达就是每一个词出现的条件概率相乘,展开就是这样:
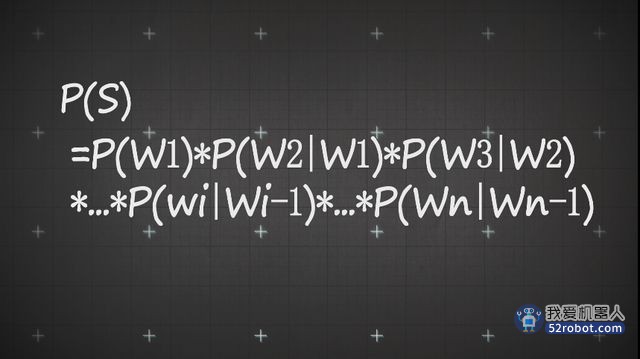
不过考虑到随着语句长度增加,计算难度太大,人们又提出了一种偷懒但颇为有效的办法:即假设任意一个词Wi,出现的概率只同它前一个词Wi-1有关,所以又可以简写成这样:
事实上,目前人类制造的所谓的“智能机器”,其实都并不具备真正意义上的智能。智能手机、智能音箱,本质上只是一个执行预设程序的固定硬件模块。因为智能体的定义是一个可以观察周围环境,并做出行动以达到目标的系统,你的手机会自主思考解决问题吗?
现在的人工智能实质上是一个没有任何常识、没有类比联想能力、更没有自我意识,但运算能力超强的“傻子”。它所谓的智能化,其实只是按照既定任务制定的相应算法,快速完成计算,并保证几乎不出错的能力。
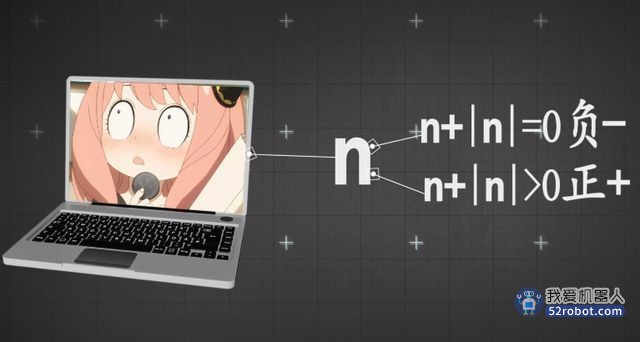
比如最简单的,你想让计算机判别正负数。机器可没有正负数的概念,我们只能设计一套算法,将输入的数字取绝对值并与自身相加,结果为零的就是负,反之则为正。
顺着这个逻辑,如果我们提出一个非常复杂的要求,比如识别图像当中的“人类”,那么跟据这一要求制定出来的算法,就是目前我们能达到的“人工智能”:并不需要直接模拟出一个具有完整人格的人类,只要做出一个“黑箱”,让它能够完成和人类一样的反应就可以了。算法只需给出计算结果,并不需要在意程序是否真正懂得人的定义。
其实目前的“人工智能”只是局限单一功能的高级算法。比如前两年很火的alpha go 和它的同门师弟alpha fold,就应用了“神经网络学习”技术。但归根结底也就是一堆被函数连接在一起的虚拟神经元,而这些神经元的本质上就是一个“内存”,本身不具备计算能力只能存储数字。但通过函数将若干个神经元连接在一起,我们就能通过“数据训练”和“反向传播”不断修正这些函数,直到能达到要求为止。而一旦离开了它们熟悉的领域,号称战胜人类的alpha GO,也会瞬间回到“人工智障”的水平。
既然如此,如果我将无数个只能执行单一任务的弱人工智能拼在一起,不就得到了一个完美的强人工智能了吗?好家伙你这是精神领域的“弗兰肯斯坦”吧。但这个假设的最大的问题在于:人类是具有原始创新能力的,也就是人类懂得如何通过与外界环境的接触,获得并表达知识,以及使用这些知识,而目前的人工智能却没有。这里可能就有人要反驳我了:alpha go zero不就是从零开始,靠着和自己下棋,超越了使用人类棋谱的版本嘛。那么请问:用于训练的围棋规则谁创造的呢?
其实不要说人类了,就算是你家里养的宠物猫、宠物狗,为了口吃的,简单训练就能完成握手、叼回你扔出的飞盘,甚至它们还有情绪。那如果你对机器狗设计师说:安也要,你猜他会给你个什么眼神。
所以一个残酷的现实就是:“我们人类目前创造出的人工智能产品,都还在弱人工智能阶段,其智能程度还远不如一条狗”。其实这也没什么好奇怪,更不用感到沮丧。毕竟我们现在的AI产品只是人类在试验室花几年时间就能做出来的,而包括人类在内的生命万物是以整个地球为试验室,用35亿年进化而来的。

▲《西部世界》中的人造肉体
不妨仔细看看你自己的身体吧,这个目前已知最智能的“机器”,皮肤、毛发、骨骼、肌肉、血液,在一个包含800亿个神经元大脑操作下完成各种复杂动作、自主思考、自主学习,而现在最精密的芯片门电路数量刚过亿。我们现在不光模拟不出人类的“智能”,就连肉体也造不出来。
所以还是那个大家感兴趣的话题“人工智能会毁灭人类吗”。我觉得完全不用担心,至少我们这代人造出的人工智能不会。这其实通 过一个简单的逻辑悖论就能解释:上帝能造出一块自己搬不动的石头吗?
想象一下:有一种神秘的、无法感知的力量创造了我们人类这样的智慧生命体,而我们居然在想自己能否创造一个比人类更高等级的智能体,谁给我们的自信。就好像我遇到一个无法解决的问题,那我就创造一台能解决这个问题的机器吧。所以我觉得人工智能,并不是要造一个比人类更高级的智能体,而只是一个可以极大扩展我们能力的专业工具。
所以人工智能究竟会给人类带来什么,对我们来说就是一个“盲盒”。不过,对未知保持与生俱来的恐惧,多一些谨慎总不是坏事。比如一个很现实的情况:人类基础科学的进步已经变得越来越慢,因为知识量的激增,使得科学家的培养时间被拉得越来越长。也许在不远的将来,利用人工智能来辅助基础科学研究将是大势所趋,所以我们更应当以开放的态度看待“人工智能”。毕竟和近在眼前的核战争相比,担心人工智能造反实在是有些杞人忧天了。

看到这或许有人会说:“我确实不担心人工智能造反,但我真的想要一个机器人老婆啊!那岂不是这辈子都没戏了。先别那么绝望,仔细想想,四足机器人从某种程度上看,不就是“仿生人”的雏形吗?
导盲、搜救、缉毒,这些专业的工作犬,未来完全可能用机器狗取代。那既然我们想用机器人取代工作犬,就必须深入的分析一下工作犬的工作,比如军犬、警犬就需要高强的机体结构以及强大的运动能力;搜毒犬、搜爆犬、搜救犬就需要相应的高精度传感器系统,光这些已经很困难了。而且工作犬是全智能的,只要训导员给出命令就能“自主”完成任务。

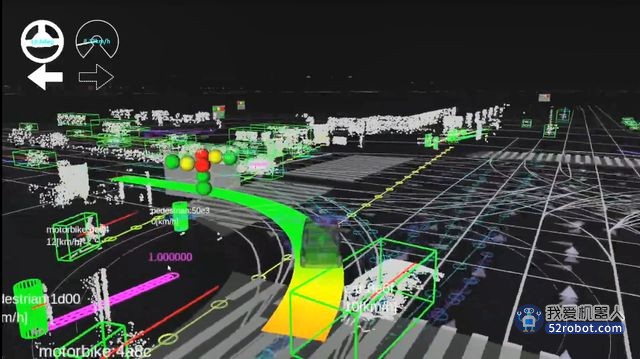
那么想让机器狗变的智能,首先要让它能自主走起来,要做到这点,狗狗就要知道几个事:自己在哪?目的地在哪?走什么路线过去?那这就需要一套自动导航系统,首先需要有环境地图,这地图可以是事先制作好的,也可以是用激光雷达搭建起来的。提前获得机器人周围,如高低差,障碍物位置等环境参数。然后我们需要知道机器狗自己所在的位置,比如在室外,我们就可以利用卫星定位技术,而室内就需要辅助激光雷达匹配定位技术来定位。毕竟要是连起点都没有还导个什么航啊。

▲寻路导航算法
在所有准备工作都完成后,我们就可以输入目标位置的坐标参数,寻路算法就可以搜索地图,并结合机器人的运动模型,规划出一条当前位置到目标位置的可通行路线。军迷应该猜到了,这不就是巡航导弹的原理嘛。
那有的观众就要问了:寻路算法是怎么自动搜索地图的呢?这个其实也不复杂,核心原理估计很多观众在大学都学过了。我们只需要将之前建立的三维地图“函数化”,结合机器人的尺寸、能越过的障碍物高度、能爬的楼梯台阶高度、能行走的斜坡坡度等因素,对已有的三维定位地图进行分析处理,得到用于导航的可通行地图。
这样就可以把寻路问题转换为,可计算通行地图上,两点之间距离的“积分最小值”,这就是一个纯数学问题了。但还要考虑到机器狗的工作环境是动态变化的,因此要结合避障系统,允许狗子暂时偏离寻路系统规划的路线,实时避开新增障碍。当原有路线被完全堵死时,寻路系统还要重新规划其他路线。怎么样你学会了吗?
还没完呢!不要以为解决了寻路和避障算法问题就“万事大吉”了,四足机器人毕竟是一个执行终端,软件始终是要为硬件服务的。拿人来作比较:就好比人在进行运动时,大脑会把复杂的环境信息处理好,为你权衡利弊规划路线。可大脑也不是万能的呀,想要指挥四肢还必须借助小脑的“姿态控制”功能,你可以把小脑看做是身体的“运动指挥家”,完成一个动作(跑步、跳跃)就好比要演奏某个曲目,只有大提琴、小提琴钢琴是没办法完成,还需要一个指挥家来协调每个乐器的节奏。如果人的小脑受损,就会发生“共济失调”,这就好比赛龙舟,没有带头的鼓手指挥,就算所有船员都用力划,也到不了目的地。这也解释了为什么我们很多人“一看就会,动手就废”。其实就是大脑学会了,小脑没学会。

更重要的是:我们的小脑功能是非常强大的,靠着几瓦的功率控制着人体内60亿条肌纤维的收缩,相当于用一台手机同时控制几百条大型流水线。你要是要求哪个企业做出这种装置来,我估计他们的工程师一定会用非常关切的眼神看着你,然后拨通精神病院的电话。
那么四足机器人的“小脑”又是如何工作的呢?云深处处的技术大佬耐心解答了我的疑问。他们告诉我:“现在动作控制算法的进步几乎是日新月异”,可以通过不断“试错”和反馈建立起了一套可靠的运动控制系统,当然和动物的小脑相比还差得远呢。

现在,大脑和神经都有了,我们距离造出“机器狗”就只差肌肉了。人工肌肉肯定不现实,那就只能牺牲一下撸狗时的手感,选择比较成熟的“电动机”了。你们小时候玩的四驱赛车里的“马达”就是电动机的一种。当然,直接把玩具车的马达塞进机器狗用,肯定是不行的。你想啊,玩具车只要一直跑,压根就没有对电机的控制精度和输出扭矩的要求。

而四足机器人可是要模拟肢体动作的,对电动机的启动速度、控制精度、输出稳定性的要求十分苛刻,这就是伺服电机。虽然个头不大,但千万不要小看它,伺服电机可是妥妥的高精尖产品。在编码器的加持之下,其控制精度可高达0.003°,并且能够在几毫秒到十几毫秒内,加速到额定转速,作为动力源的“永磁体同步电机”的寿命也很长。可能光这么说大家还是没有直观的感受:伺服电机就好像你在打游戏的时候,用着直连的千兆光纤、延迟只有几毫秒,各种外设也是丝般顺滑。而普通的异步电机就好像顶着好几百的延迟,30%的丢包率、时不时掉帧、鼠标还时不时出故障,现在你知道电机性能对机器人的重要性了吧。

▲云深处的抢险救灾机器人
费了这么多功夫,总算是把机器狗攒出来了。相比传统的工作犬,机器狗不会疲劳,不会分心闹情绪,更绝对不会出现“二驴”那种“公然抗命”的举动。不光能在抢险救灾、电力巡护、快递物流等诸多传统领域中发挥作用,还可以代替人类和工作犬,从事诸如核废料处理、排雷排爆、剧毒化学品处理等危险任务。

▲云深处的电路巡线机器人
比如云深处处的产品绝影X20,已经接替了很多巡线员的工作,让电力从业者们可以从繁重的重复劳动,以及相对恶劣的作业环境中解脱出来,坐在办公室里吹着空调吃着西瓜就把活给干了。
而且在机器狗普及和功能完善后,能在更多的工况和工序中辅助工作人员,保护他们的人身安全。甚至在设计作业环境时,对不适合人进入的场所,就不必再设计专门的人员通道和应急措施了,无形中又节省了一笔开支。说到这,很多人肯定发现了。没错智能机器人实际上是软硬件深度结合的产物,存在着硬件和软件两条发展脉络。智能机器人真的是一个跨时代的产物,单纯的人工智能算法是没有办法打破虚拟世界和现实世界之间的隔阂的。

将人工智能搭载在智能机器人身上,就可以直接将虚拟世界里的命令转化为实际行动。比如机器狗可以在大街上巡逻,发现垃圾就去清理,全程不需要人的干预,真正做到“让程序在 现实世界中运行”。另外有别于传统的“机械”,智能机器人是拥有完整而复杂的感知系统的,这也是曾经生物与机械之间的区别之一。一台机械手不需要复杂的传感器,它只需要执行命令就可以了,而智能机器人可以有视觉、听觉,能够对外界的刺激做出反应。这也就意味着:当人工智能同机器人完成结合之后,机器人就可收集大量的数据。如果技术继续发展,也许有一天智能机器人甚至可以完成“自我迭代”。
一旦进入了这样一条快车道,几乎所有的行业会受益。寻路导航算法的进步会刺激自动驾驶技术的发展;更加精密复杂的动作控制系统可以反哺医疗产业,为残障人士提供更加优秀的假肢,甚至催生出攻壳机动队中的“义体”,真的制造出“合成人”也说不定呢。
在未来,智能机器人所搭载的功能模块肯定会越来越多,但要说最重要的功能模块,那肯定还是不同机器人之间联络的“互联模块”。未来的机器人肯定不仅是独立作业的个体,多个机器人,特别是不同种类机器人之间互通协作将给人类带来更大的惊喜。

假如不同机器人之间共享位置信息,再给它们搭载上3D打印模块,就能组成一台不受空间限制的3D打印机,换上测绘模块,一支机队就可以把整个城市扫描成精细的3D模型。一旦实现了这些,智能机器人就完成了从设备到平台的进化,下一步不就是我们常说的万物互联了吗?
但是,仰望完星空我们还是得回到脚踏实地上来,实事求是的说:目前智能机器人的发展还处在一个非常早期的阶段,有太多的技术难关等着我们去攻破,哪怕是一个动作都要成百上千次的实验。我之前说过:智能机器人是硬件和软件深度结合的产物,这也就意味着智能机器人的产业链长的可怕,材料科学、精密制造、半导体产业、人工智能、通讯技术、云计算、新能源等诸多领域都被囊括其中,这也就意味着智能机器人将代表着一个国家的综合科技水平。
人们常说科幻文学是人们想象的翅膀,承载着人类对未来的期许。曾经的科幻小说都在畅想美好的未来,但随着技术的发展,人们发现贫富差距加大、阶级固化,很多问题不光没有被科技解决,反而还愈演愈烈。于是朋克文学、反乌托邦设定登上了历史,当然我一个做视频的,也不敢对科技发展趋势妄加评论。但我认为:判断社会是否在向着正确的方向发展也很简单。只需问问自己:“我们的先辈看见我们今天的生活会露出欣慰的笑容吗?”就足够了。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









