工业机器人的种类有哪些?根据运动、自由度、旋转轴和功能分类
在当今的工业自动化领域,机器人处理困难、危险和重复的任务。这些工作包括搬运重物、挑选和放置零件、组装部件或协助人工分拣产品。根据机器人的运动、自由度、旋转轴和功能,可以将机器人分为几类。
1、固定机器人

固定机器人是那些执行任务而不改变位置的机器人。术语“静止的”更多地与机器人的基座而不是整个机器人相关。在机器人的底座上移动,以执行所需的操作。这些机器人通过控制末端执行器的位置和方向来操纵它们的环境。末端执行器可以是钻孔、焊接或夹紧装置。
笛卡尔龙门机器人(也叫直线机器人)有三个直线关节采用笛卡尔坐标系。它们通过使用线性导轨在X、Y和Z轴上运行。这些导轨通过在相应的轴上移动每个线性导轨来帮助将末端执行器转换到正确的位置。这些机器人通常用于拾取和放置工作、密封剂应用、装配操作或加工机床和电弧焊。
2、圆柱形机器人
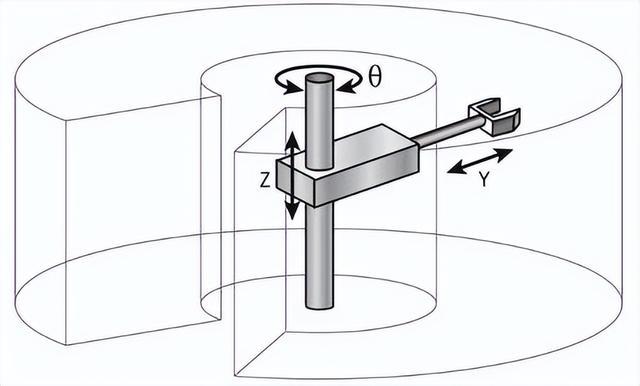
圆柱形机器人具有沿关节轴旋转的旋转关节和用于线性运动的棱柱形关节。圆柱形机器人具有至少一个旋转关节和至少一个用于在底部连接连杆的移动关节。沿着关节轴线,旋转关节采用旋转运动;沿着棱柱接头,它以直线运动的方式移动。它们的运动发生在圆柱形工作范围内。圆柱形机器人用于装配操作、机床和压铸机的搬运以及点焊。
3、球形机器人

球形机器人通过组合一个旋转关节、两个旋转关节和一个直线关节,在极坐标系中运行,实现球形工作包络。这些也被称为极地机器人。该臂通过扭转关节与基座连接,并且具有两个旋转关节和一个线性关节的组合。关节的组合轴形成一个极坐标系统,并在球形工作范围内运行。这些机器人用于加工机床、点焊、压铸、修边机以及气焊和电弧焊。
4、水平多关节机器人

多关节机器人主要用于装配应用。柔顺臂设计成圆柱形,由两个平行的关节组成,在选定的平面内提供柔顺性。这些机器人用于拾取和放置工作、密封剂应用、装配操作和机床加工。
5、机械臂
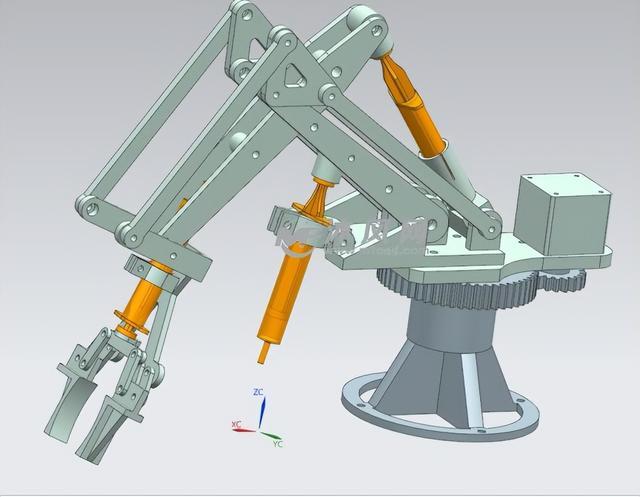
机械臂是当今制造业最常见的机器人。它们对于需要重型或危险运动的装配操作至关重要。机械臂或关节机器人具有旋转关节,从简单的两关节结构到具有10个或更多关节的复杂结构。该臂通过扭转接头连接到基座上。旋转铰接臂中的连杆;每个关节是一个不同的轴,并提供额外的自由度。工业机械臂有四个或六个轴。这种机器人主要用于装配作业、压铸、修边机、气焊和电弧焊、喷漆。
6、并联机器人
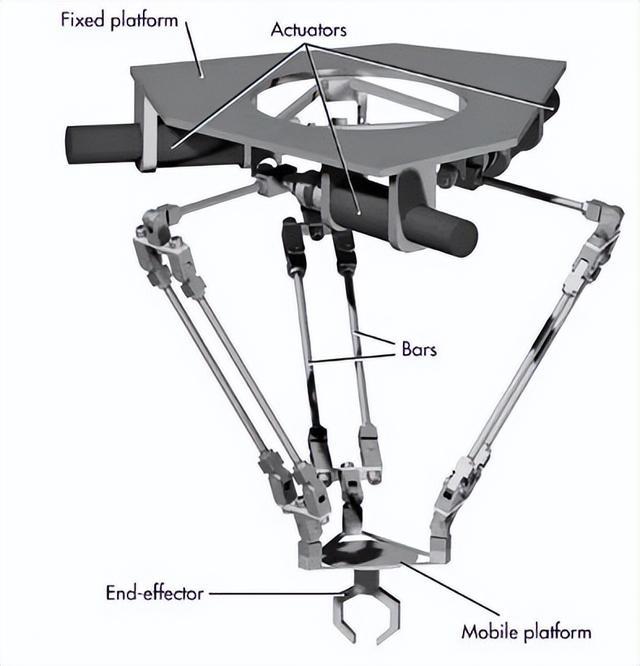
并联机器人也叫三角机器人。它们由平行四边形连接,平行四边形连接到一个共同的基底上。平行四边形在圆顶形封套中移动手臂工具的一端。它们主要用于食品、制药和电子行业。机器人本身可以精确移动,这使它成为拾取和放置操作的理想选择。
7、轮式机器人

轮式机器人是基于车辆的,并在驱动系统或轨道系统的帮助下改变它们的位置。这种机器人易于机械化建造,相关成本较低。这些机器人易于移动,可以在不同的环境中操作,并且有多种形式,包括单轮、双轮、三轮、四轮、多轮和履带式。本设计针对无人驾驶地面车辆操作。由于其专利的安全保护接头,这种设计可以处理各种载荷,适应大多数地形。关节有助于在困难的地形上稳定平台,确保它可以在不翻转的情况下爬上台阶。它可以用于不平坦的地形和仓库或办公楼中的运输设备。该机器人是可定制的,这意味着用户可以添加传感器、机械臂或不同的有效载荷来完成任务。
8、腿式机器人
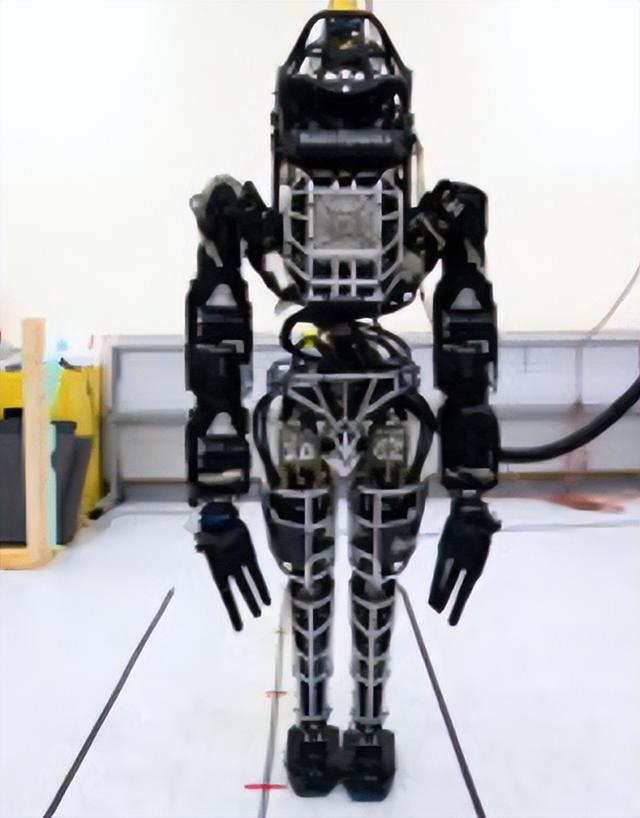
腿式机器人也是一种移动机器人,但它的动作更复杂。这些机器人有机动化的腿部附件来控制它们的运动,因此它们可以在不平的地面上有效地工作。然而,由于它们的复杂性,这些机器人的成本往往更高。机器人的类型包括单足、双足/双足、三足/三足、四足/四足、六足(六足)和多足机器人。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









