国产机器人在高空领域挑战极限,镌极科技争做爬壁作业王者
5月31日,镌极科技重磅发布全地形磁吸附爬壁机器人。该机器人是国内首次公开亮相能解决爬壁机器人高空作业、越障以及实现内外折角跨越的创新产品,有望解决船舶、化工等重工业领域高空爬壁作业刚需,打开我国高空自动化作业新局面。
镌极科技是上海交通大学科技成果转化项目公司,与绿的谐波旗下的开旋动力、钧微动力、赛威德等公司合作密切,以争做全球壁面移动机器人领导者为己任。
本次镌极发布的爬壁机器人参数非常优越,具备高达2:1负载/自重比,该款爬壁机器人能够轻松搭载一台协作机器人进行高空作业,完成高空焊接、打磨等复杂的爬壁作业,该项技术成功弥补了国内复杂环境高空作业市场空白,核心技术达到国际水平。
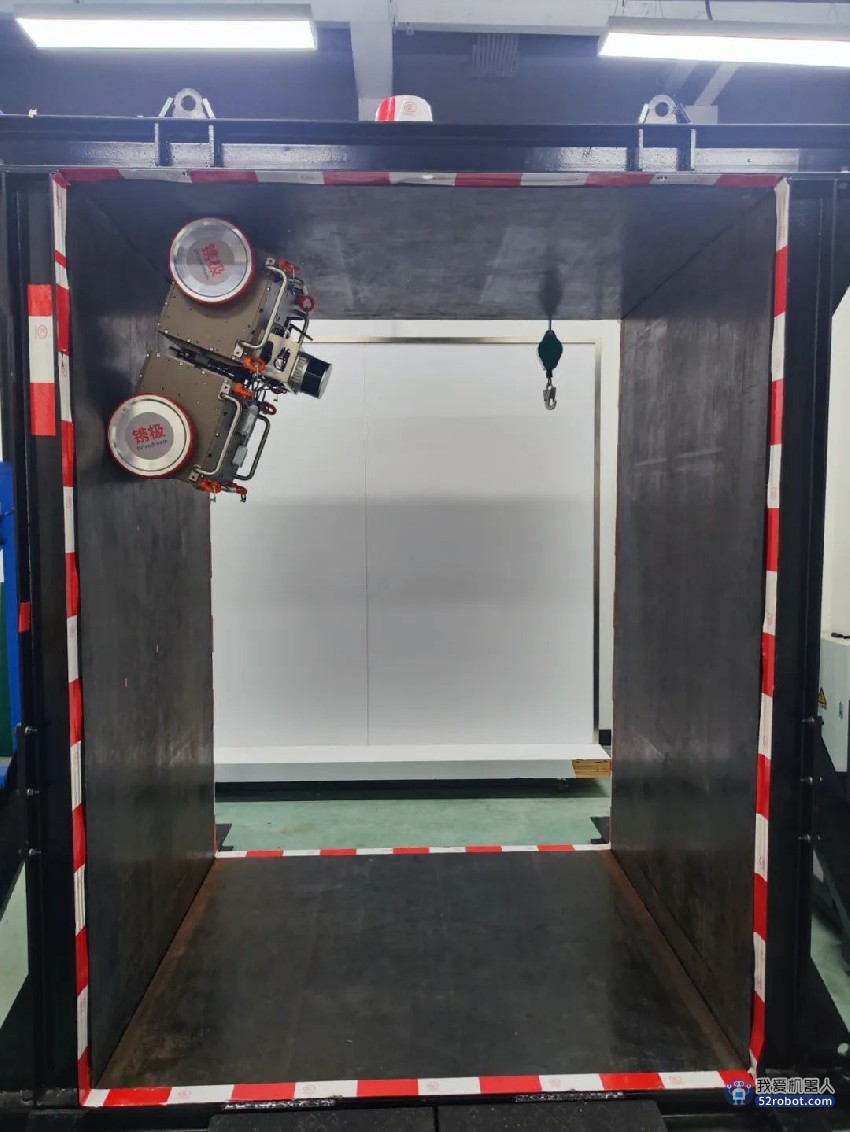
图1、机器人从立面到倒立面
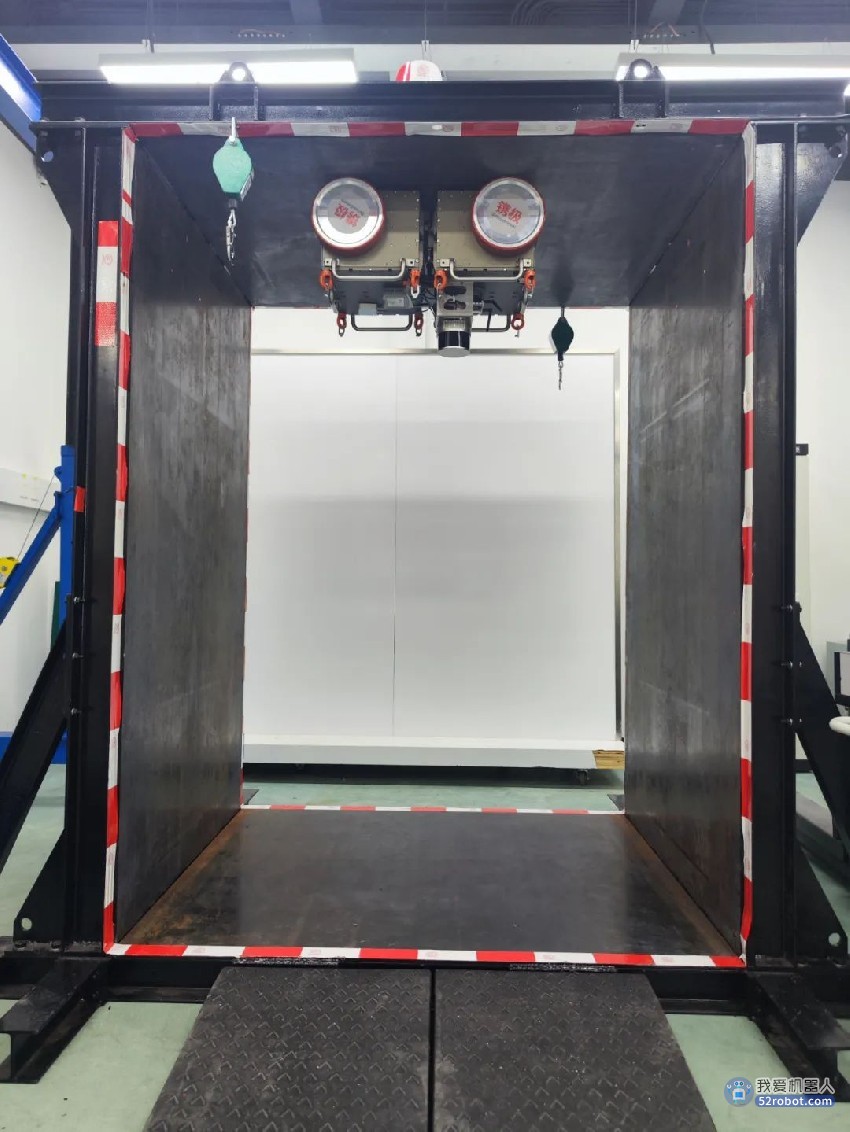
图2、机器人在倒立面运动
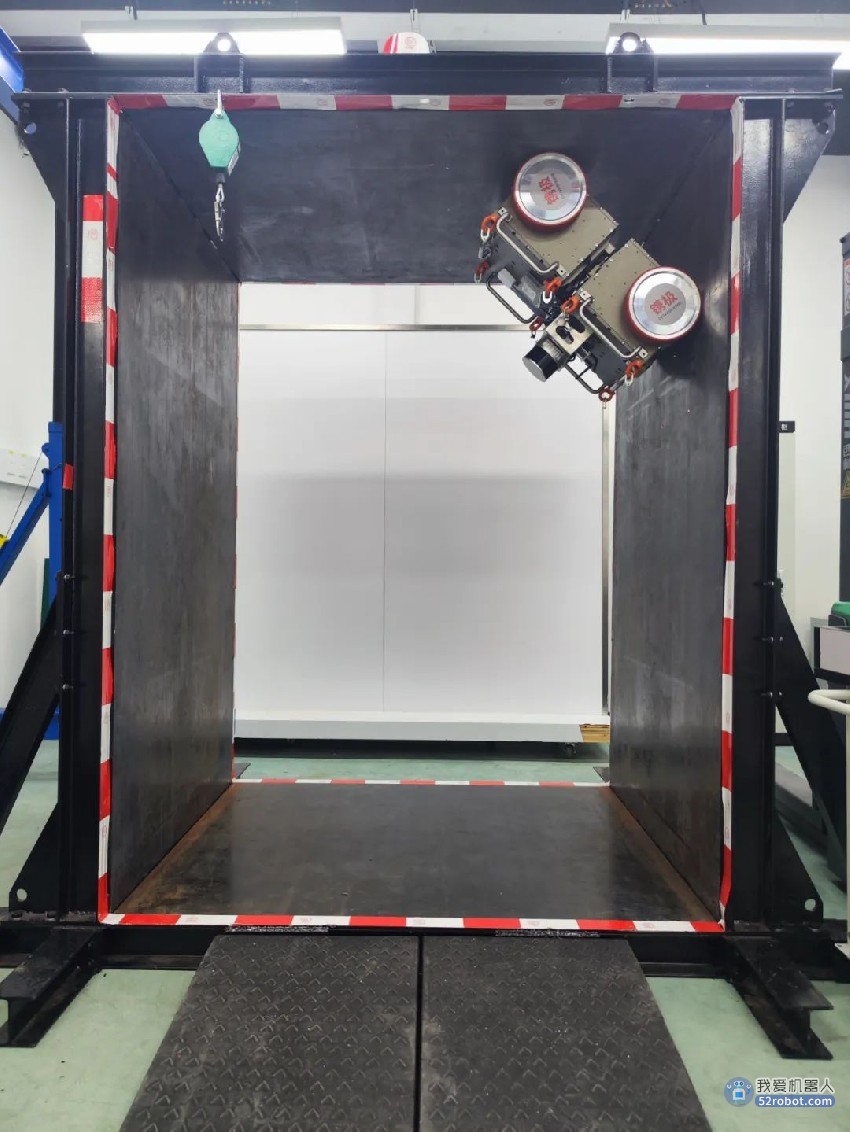
图3、机器人从倒立面到立面
该款产品背后,是镌极为机器人产品创新开创的复杂壁面全地形适应技术,机器人本体基于自主研发的大磁隙永磁吸附技术与阵列化大负载磁吸技术设计成,结合磁吸力感知调节与预警的创新方法,在四轮框内爬壁平台与五轮可变形爬壁机构基础上优势互补,在性能上突破了轮式爬壁移动机器人运动极限,首次完成内外折角及越障功能全覆盖,从而实现了机器人在高空作业的高移动能力、高适应能力、高通过能力、高负载能力,在国际上首次解决了复杂三维壁面爬壁作业难题。
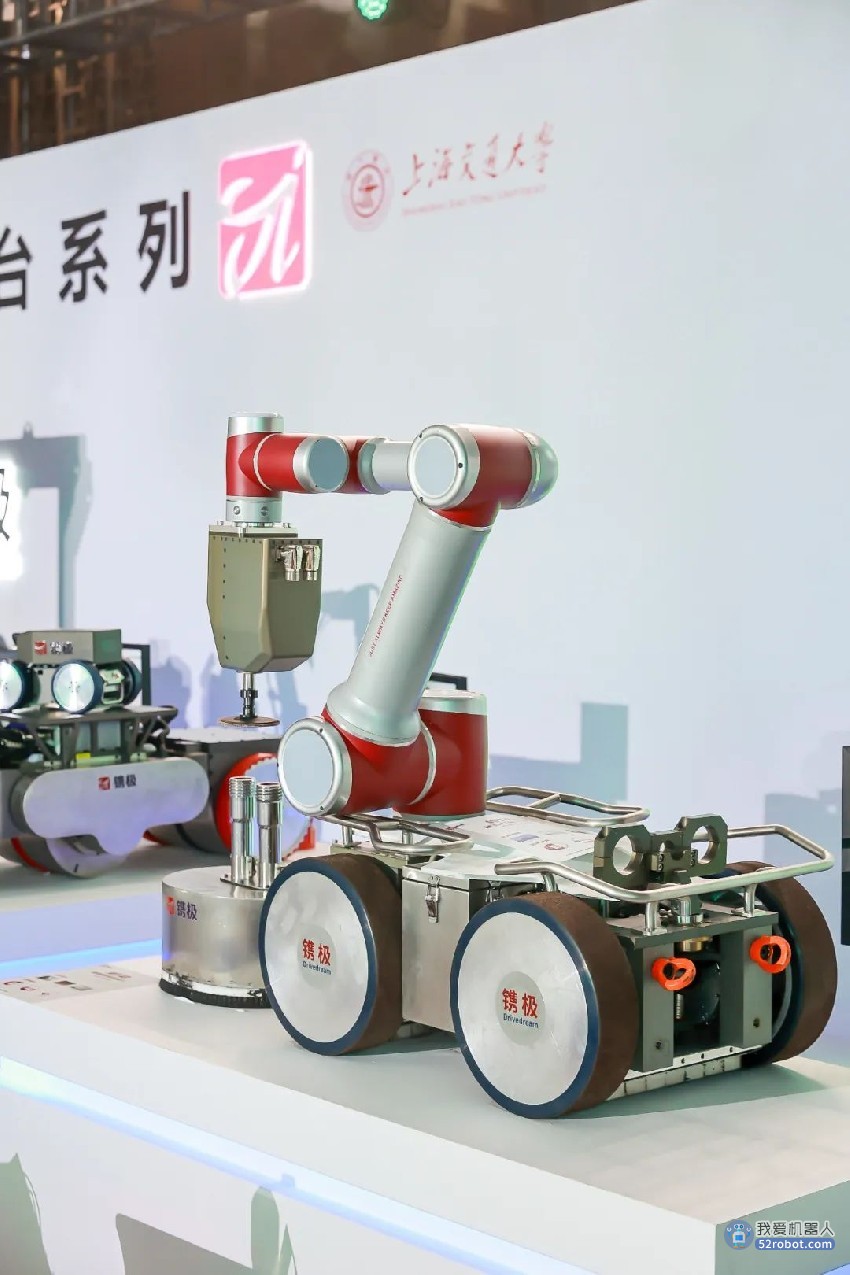
图4、四轮+六轴移动打磨爬壁机器人
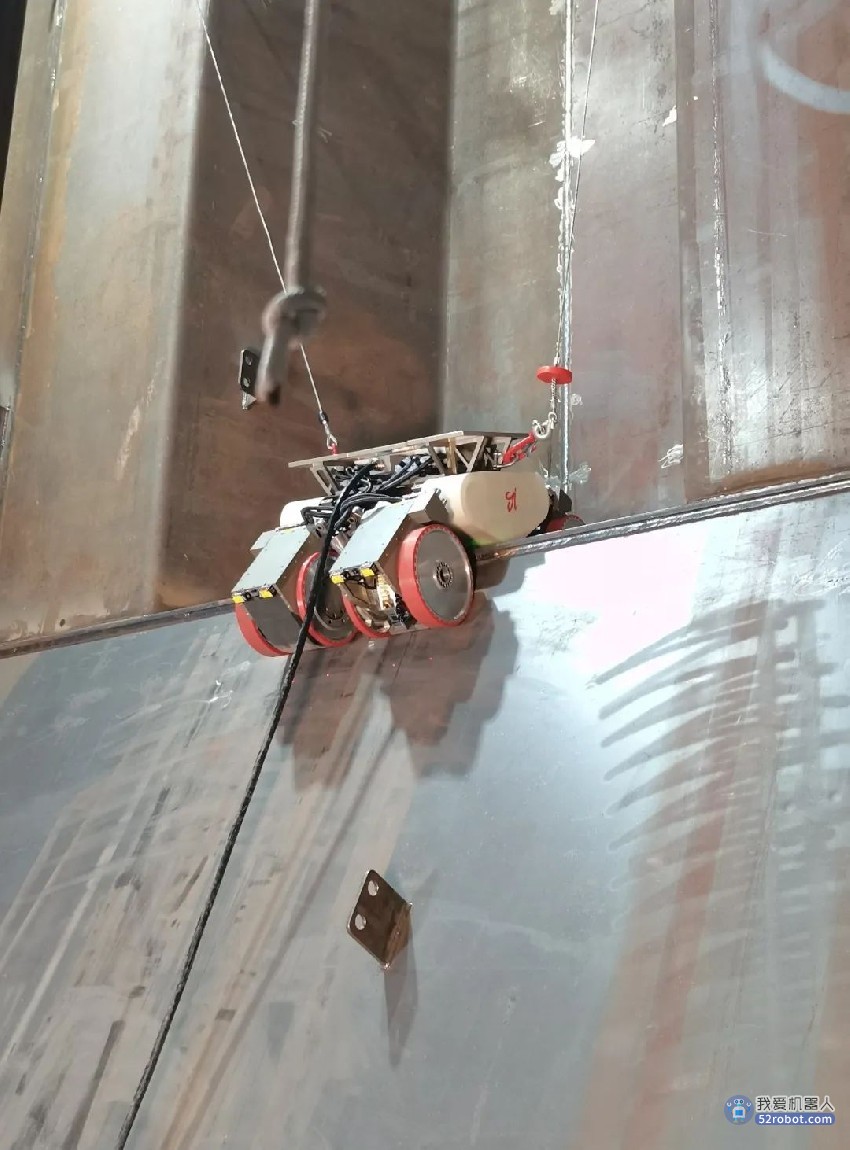
图5、五轮全地形爬壁机器人正在翻越外折角
以造船、石化等高端行业的部分场景为例,镌极爬壁机器人系统能够携带机器人及末端操作设备在空中提供自动化作业可能,并根据客户需求提供涵盖软硬件、算法及服务的综合解决方案,完成高空场景的多个工艺一体化作业。这在功能、性能和服务上与市面上的多家高空机器人产品实现了巨大差异化。
在实际作业流程中,镌极爬壁机器人还能够实现多传感器融合下的复杂场景实时建图、定位、路径规划及自主决策。同时,由于镌极爬壁机器人还具备环境感知和避障、补偿力反馈机制赋予强越障能力,当机器人遇到复杂地形,可以自主调整轮面以增加环境适应性,且借助力磁耦合设计及控制算法实现,使整机维持极高综合负载能力条件下能耗最优。这使得镌极爬壁机器人具有不同复杂曲面适应力,能够更好实现复杂壁面作业,也意味着机器人能够很轻松切入罐体、船舶等行业的焊接、涂装、打磨、检测等全新领域,提供高性能、高精度且高度智能化的全新解决方案。
未来镌极爬壁机器人将主要面向重大工业领域提供机器人应用与解决方案,特别是在高空、密闭环境等危险作业环境,能通过机器人系统来帮助企业实现高空作业自动化,提高作业安全性、效率和质量。有望用于例如造船、石化、水电、火电、风电、核电等行业的船舶内部检修、储罐外表检测、大型钢结构、水冷壁、风塔等高空作业等。
据了解,镌极该款爬壁机器人主要通过与绿的谐波、上海交通大学开展“产学研用”合作开发,在研发过程中,重点攻克了精密减速器、电机、伺服系统、EHA等领域的部分卡脖子难题,让产品国产化率逐步提升。目前,镌极爬壁机器人已经实现了关键核心零部件全部为国产自研部件,采购成本及关键零部件品质完全自主可控。
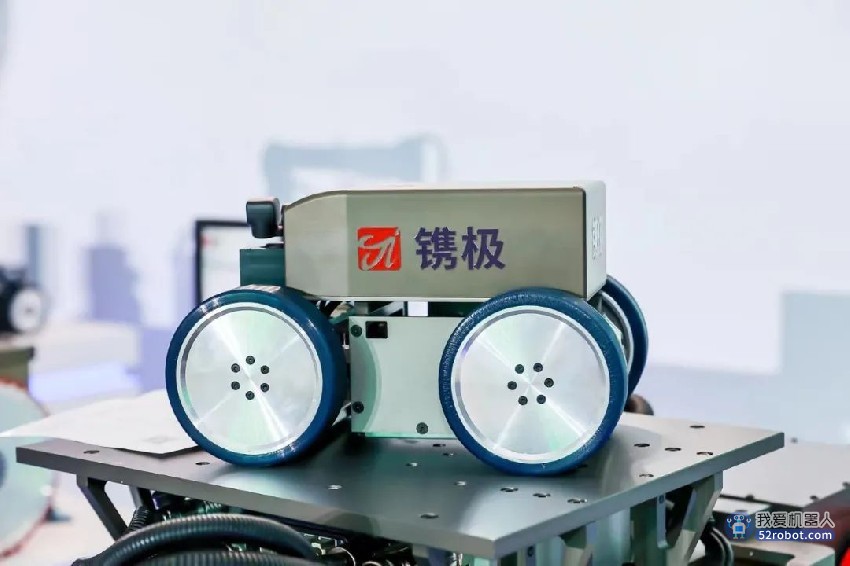
图6、小四轮爬壁检测机器人
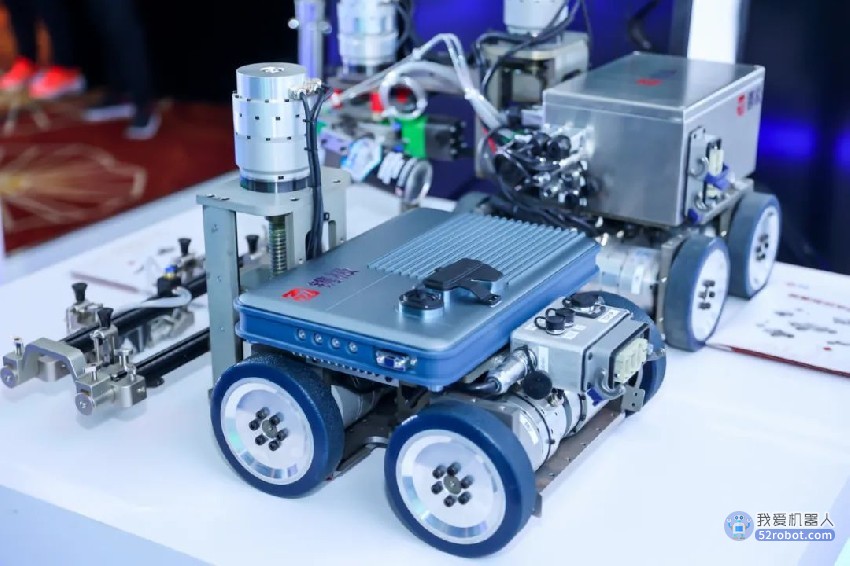
图7、相控阵四轮爬壁检测机器人
上海交通大学机器人研究所副所长、镌极科技联合创始人赵言正教授表示,未来镌极将继续加大研发投入,跟随行业技术发展趋势,持续创新产品与方案,增强机器人在自主导航能力、负载稳定性、遥控操作等方面性能,不断提高产品的智能化与综合性能,最终走向全球高端市场。
目前全球高空作业市场规模超过200亿美元,而机器人可以替代约50-70%的高空作业。永磁吸附爬壁机器人可充分满足这部分需求,市场潜力达数十亿美元。据悉,镌极目前已经取得一定市场订单,未来有望占领尚处空白的国内市场,并与国际企业同台竞技。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















