“药械之王”达芬奇发展史:机器人手术梦想
15世纪末达芬奇遗留下来的手稿中有关于机器人的设计,据说后来的研究者依照达芬奇的原始设计重新生产出来了能进行复杂功能的机器人。人类能够执行外科手术曾经被认为是一种奇迹。外科作为科学自身有一部辉煌的发展史,撇开手术的难度,从切口来看曾经历了两个时代:开放式手术和小切口手术。过去做肾脏手术需要很长地切口,甚至还要去掉肋骨,而腹腔镜小切口手术只需要几厘米,这无疑是很大的进步。但是它们的共同点是必须要有外科医生亲手握手术刀做手术。
信息科学的进步使外科手术进入第三代,手术可由机器人执行手术,医生做手术的手被具有触觉功能、可操作的机械臂取代。医生在计算机终端前操作,计算机将医生的手在病人体外的活动转化成仪器在体内微小的精确运动,曾经是科学幻想的机器人手术终于变成了现实。
机器人进人外科手术领域是缘于其无与伦比的控制性和微创手术操作的精细性。外科机器人技术与系统,是机器人技术、计算机控制技术、数字图像处理技术、微机电系统、传感器技术、生物制造与临床医学技术相结合的新兴多学科交叉技术,可以有效辅助医生进行手术定位和手术操作,提高临床手术的精确性、灵活性和稳定性,实现微创手术和数字化手术。随着经济发展和社会进步,我们可以期待,有一天,机器人辅助内镜手术可能会取代人工内镜手术,成为外科微创治疗的最佳选择。
❶ 高级外科医院(MASH)与战地外科车
在1980年代中期,美国宇航局(NASA)研究虚拟现实的团队中加入了费歇尔博士(S. Fisher)与罗森(J. Rosen)医生,他们设想利用虚拟现实的技术创造一种远程机器人手术,并邀请斯坦福研究中心的格林(P. Green)博士的生物机械团队尝试设计一个用于手外科手术的远程高精缝合血管与神经的装置。
由于1980年代后期,内窥镜手术进入了跟开放性外科手术竞争的时代,腹腔镜手术当时面临的挑战是缺乏手感、缺乏三维视野与操作困难,外科医生需要大量的训练才能基本掌握该技术。意识到格林等人的系统可以解决腹腔镜手术的困境,沙塔瓦(R. Satava)医生建议格林把研究方向转移到了内窥镜手术。沙塔瓦与格林的研究后来引起了陆军外科总管拉娄(A. LaNoue)的注意,在他的支持下,沙塔瓦被调进了五角大楼的高级研究项目所(ARPA),主持发展远程手术。
对于军队来说,远程手术可以让医生远离战场操作在战场中的机器人进行急救,具有极大的生命效益。该系统由移动的高级外科医院(MASH)与战地外科车(称为MEDFAST)组成。这个系统于1996年通过实地测试,但由于战争形式的改变,并未被推广用于实际战斗中。
❷ 第一台机器人手术系统
1992年,兽医鲍尔(H. Paul)与巴吉尔(W. Barger)医生跟IBM华森研究中心的泰勒(R. Taylor)合作,试图解决股骨头置换的精度问题。他们发明了一个能给狗施行髓关节置换手术的机器人系统,即第一台机器人手术系统(RoboDoc),它不仅是骨科的第一台机器人手术系统,也是第一个应用于医学领域的机器人手术系统。在1990年代初,兽医常规手术的精度只有75%,而他们开发的系统将之提高到96%,他们将之命名为“机器医生”,该装置先后在人体与动物身上证明其临床价值后上市进行商业开发。后来类似装置被扩展到了其他关节的应用上。
❸ 内镜自动定位系统(AESOP)
1994年,美国食品药品监督管理局(FDA)核准第一台内镜自动定位系统(AESOP)应用于腹腔镜手术。该系统具有声控功能,可以灵活显示手术视野。为了提高灵活性,医学界早在20世纪90年代初就提出了主从式手术机器人的概念。斯坦福研究院研制了第一代主从式手术机器人,设计理念是利用计算机将外科医师的手部运动转换为指令,传输至终末效应器,操纵远端器械。
第一代手术机器人系统已在世界各地医院手术室建立,然而,它们并非真正意义上的智能手术机器人,而是一种“机械手”,用于各种辅助手术。它们需要医师的操纵或根据人类的指令进行操作。
机器人手术的优点:操作者坐着完成手术,不易疲乏,可以更轻松的完成长时间高难度手术;避免了因为长期手术导致的疲倦和手腕颤抖;通过软件滤除了人手的震颤,减少粗糙操作造成的损伤;避免了人类心情、情感因素对手术的影响;三维成像系统,从而使手术变得容易,缩短学习曲线;内腕系统,灵活度接近并在某些方面超过人手,可以完成腹腔镜所不能完成的动作,甚至可以完成人手所不能到达的生理曲度;可以连续完成精密动作而不会产生失误;可以完成人类无法完成的超精密动作;手术时间缩短,术后感染几率小(<0.1%)。
手术机器人也有缺点;没有触觉,无法分辨组织的韧度,触摸血管搏动;没有温热觉,无法分辨不同体内组织间的温度差异;对大的动作有“力反馈(forcefeedback)”作用,但对精细动作不起作用;需要助手更换机械臂;控制台与机械臂之间的无线通讯易受到干扰。
就目前技术而言,还不可能由机器人独立完成手术,机器人终究还只能起到一种辅助的作用。
❹ 多功能宙斯(Zeus)系统
1995年,受军方支持的王雨伦(音译)博士的动态电脑(Computer Motion)公司设计的自动最佳定位内窥系统(AESOP),该系统为继“机器医生”后第二个为FDA批准的商业产品,1998年,该公司推出了新一代的多功能宙斯(Zeus)系统。
宙斯系统侧重于增加操作复杂性与符合人体工程设计,而达芬奇系统则更强调手术操作的真实感。由于动态电脑公司与直觉外科公司因为专利纠纷而在2003年合并,宙斯系统现已停产,达芬奇系统成为市场上唯一的外科机器人。
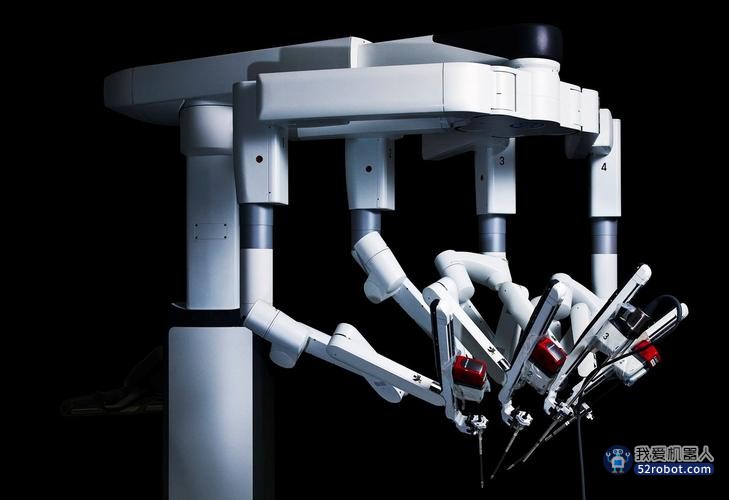
❺ 达芬奇(da Vinci)系统
2000年7月,第一个FDA准许使用的手术机器人以文艺复兴时期伟大发明家达芬奇的名字命名,称达芬奇手术系统。 当年斯坦福研究中心的格林(P. Green)博士格林设计的战地外科车,1995年战地外科车,为莫尔(F. Moll)医生建立的直觉外科(Intuitive Surgery)公司商业化,1999年进人实际试验。被命名为达芬奇(da Vinci)系统,它于1999年开始推出,2000年6月德国法兰克福大学医院泌尿外科医生利用达芬奇手术系统完成世界上首例完全用内窥镜监视下进行的前列腺切除根治术。2000年7月FDA批准达芬奇手术系统可以在腹腔镜手术中使用,达芬奇手术系统就成为美国第一个允许在临床环境使用合法的商品化完整的手术机器人。
FDA的项目评估专家认为达芬奇手术系统能够在细小空间内精确地完成意义重大的医疗活动。2000年8月San Ramon地区医学中心绝育专家利用它首次完成输卵管重接手术。2000年11月东加州大学Rrody医学院心脏外科医生利用达芬奇手术系统完成北美首例二尖瓣心脏外科手术。2000年12月FDA批准达芬奇手术系统进行二尖瓣修复小切口手术多中心临床评价,确定由美国6个主要医学中心对50个病人进行临床试验。2001年3月FDA又批准可以在胸腔镜手术中使用。使得这一机器人手术系统的允许使用的领域将大为拓宽。
❻ 微创手术高级机器人与远程操作系统
在大西洋彼岸,1995年英国的威克汉姆(J. Wickham)爵士等人发展了类似机器医生的装置,主要用于前列腺手术;德国卡尔斯鲁厄核研究中心的润斯兰德(H. Rinnsland)博士等人发展了类似格林系统的远程操作装置“微创手术高级机器人与远程操作系统”(ARTEMIS),不过,该系统的开发后来因经费不足而被迫放弃。
患者和外科医生之间的距离有一定的限度,超过这一限度,器械控制的精确度和灵巧性将大打折扣,还不可避免地造成其他组织误伤。解决这一问题的最佳方法是采用高带宽地下纤维电缆传输远程手术图像,这一新的传输技术在 2001年9月使Mares-caux和Gagner在美国纽约和法国Strousbourg之间施行机器人辅助腹腔镜胆囊手术成为现实。
❼ 机器人的进一步发展
在泌尿外科,机器人已安全用于前列腺组织切除。其安全装置是利用环状钢构架限制机器人只能进行精确的弧形切除,而不会切除钢构架范围之外的组织。另外,一些中心已经开展了机器人辅助前列腺切除术。2004年在美国机器人就成功完成了各种外科手术2万例。其中前列腺切除(前列腺癌根治)8000余例,占所有前列腺切除的10%左右。
2005年4月,在诺福克岛、弗吉尼亚和德国柏林三地成功地完成了机器人辅助远程合作前列腺癌的切除手术。3位外科医生位于不同的国家和地区,他们通过苏格拉蒂机器人、远程合作系统,在他们各自的办公室里成功地完成了这例难度较高的手术。
2007年9月26日报道美国斯坦福研究院国际公司(SRI International ),将在一架飞越墨西哥海湾上空10万米的美国宇航局C--9运输机上首次进行零重力外科机器人手术,外科医生在远至千里之外对机器人进行远程控制。目前,全世界远程合作手术和远程教学手术仅施行20多例。
加拿大2007年宣布研制成功世界首部脑外科手术机器人,这种机器人拥有敏锐的触觉和超凡的“视力”,可以有效帮助医生完成精微脑外科手术。这种被称为“神经手臂”的机器人将脑外科手术与航天科技结合起来。它的出现使神经外科医生可以完成许多高危险性手术。机器人内置核磁共振成像装置,能够洞悉人体中最微小的神经构造,并绘制出清晰3D图像。“神经手臂”的操控设备类似一座驾驶舱,由手术医生负责操纵。医生通过观察一座立体图像显示器实现操作。显示器与机器触手相连,可以显示器官的纵深透视图。同时,医生可以参考旁边电脑上显示的核磁共振图像,甚至可以通过机器人内置麦克风听到它在人体内执行操作的声音。操控台还有一具显示3D图像的触摸屏。通过调整视角,医生可以全方位观察病人的病情。
自1980年始,外科机器人手术发展迅猛,从开始设想,到现在每年超过500篇相关研究文献发表在专业杂志上。同样的趋势出现在使用达芬奇系统进行的手术上,现在每年约有20~30万次手术经达芬奇系统执行。目前全球有1400多台达芬奇机器人在近900家医院投入使用。2003年9月10日,首例远程医疗外科机器人临床立体定向手术在北京海军总医院与沈阳医院进行,身在北京的海军总医院神经外科专家田增民主任通过计算机网络遥控远在600公里以外的机器人“黎元”,为沈阳的一名脑出血患者成功手术,这标志着全国首例异地遥控机器人为患者手术顺利完成。2008年4月12日,解放军总医院泌尿外科高江平教授与法国马赛大学医院的Bladou教授共同完成了国内首例现场直播、通过控制机器人手臂实现的“达·芬奇机器人”腹腔镜前列腺癌根治术。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















