新型水下“隐形”机器人问世,充电一次,行驶里程可达上千英里
目前研究人员已经开发出高度机动性、低成本的水下“滑翔机器人”并且可以安静地运行。这台水下“滑翔机器人”与传统的海洋机器人有所不同,因为前者没有螺旋桨或主动推进系统,这也是其最大的优势。

虽然人类在功能性潜艇的设计与研发方面做了大量的工作,但是它们嘈杂环境、需要大量的动力来驱动等缺点暴露无遗。虽然核动力潜艇能够很好地解决这个问题,但并非每个国家都能拥有这样的技术。

对此,研究人员设计了这台水下“滑翔机器人”,它利用浮力的原理,通过反复上升和下沉来推动其自身前进。该潜水器的最大优势在于,它们可以一次充电工作数月,行驶里程达上千英里。

普渡大学的机械工程师现在已经开发出了这种先进的新型水下“滑翔机器人”,这是该团队九年研究的成果。从2012年开始,在密西根理工大学副教授 Nina Mahmoudian 的指导下,研究人员开发出了“拉夫”(ROUGHIE),一种面向科学研究的水下“滑翔机器人”。

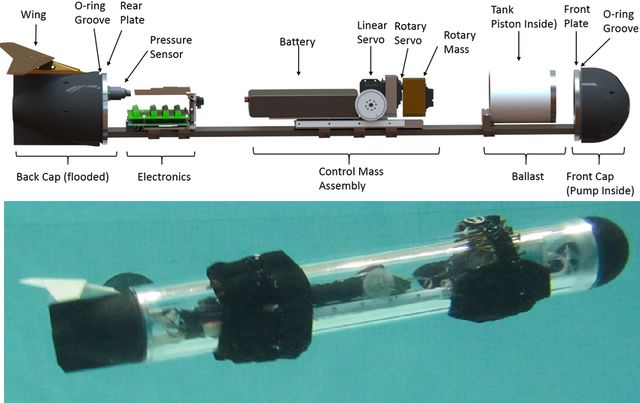
“滑翔机器人”的巧妙设计之处在于人们在外部就可以看到其运动的零部件。一个密封的四英尺长的管子中装有压载水箱,压载水箱可以充满空气或水,使其既可以漂浮在水面上,也可以沉入水中。安装在其尾翼上的机翼将机器人的上下运动转化为前进动力,而其电池则通过前后移动重量充当控制机构。最后,旋转的轨道提供了机器人侧倾时的转向能力。
不仅如此,“拉夫”也解决了传统水下机器人面临的难题,“拉夫”的转弯半径为10英尺,这使它能够应对更多复杂的水下环境。这种机动性意味着“拉夫”能够穿越复杂的路径,并且能够探索其他水下滑翔机所不能探索的危险区域。
在实际应用中,“拉夫”可以安装各种传感器,收集对海洋学家至关重要的温度、压力和电导率等数据。研究小组还为其安装了紧凑型磁力计,这种磁力计能够检测到船只失事和水下弹药等异常情况。研究人员相信,这种新型水下“滑翔机器人”的问世,对于未来的科学探索必将会产生巨大的价值。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















