佐治亚理工中国博士开发最新无肢机器人,有望用于极端环境探索
从振翅的鹰蛾,跳跃的羚羊,再到波动的蛇和线虫……各种生物通过神经和机械控制的结合产生运动。
通过神经回路整合和处理感觉信息,动物通过复杂的信号网络产生运动指令并执行精确的身体动作。
动物不仅仅依赖于神经元(例如大脑细胞和外周神经)来控制运动,还利用身体的物理特性(例如肌肉的弹性),来帮助它们在神经元有反应前就自发地对环境做出反应。
因此,从生物系统产生运动的角度来说,可以认为“具身智能(embodied intelligence)”主要由两个部分构成——“计算智能(computational intelligence)”和“机械智能(mechanical intelligence)”。
01
新的理解:“机械智能”是“具身智能”的重要部分
“具身智能”是近年来在整个机器人界很火的一个概念。作为研究仿生机器人的机器人学博士研究生,也是生物力学、生物物理学、机器人物理学等多学科交叉领域的研究者。
来自美国佐治亚理工学院的王天宇在最新的研究中,展示了其所在团队对于生物运动中的机械智能和具身智能的独特理解和解释。
近日,相关论文以《机械智能简化陆地无肢运动的控制》(Mechanical intelligence simplifies control in terrestrial limbless locomotion)为题发表于 Science Robotics (IF=34.0)[1]。
王天宇和佐治亚理工学院博士后克里斯托弗·皮尔斯(Christopher Pierce)为共同第一作者,佐治亚理工学院教授丹尼尔·戈德曼(Daniel I. Goldman)担任通讯作者。
这项研究受到同行、来自生物、物理、机器人等领域专家的肯定,他们认为这项研究有潜力把无肢生物运动的研究、以及无肢机器人在复杂地形中的设计和控制带到全新的层次,为更加深入地了解广义的跨越系统的无肢运动、以及如何利用在生物中学习到的原理去提升机器人性能开辟更多新的可能性。

图丨相关论文(来源:Science Robotics)
基于对“具身智能”的独特理解,王天宇将“机械智能”的概念延伸到仿生机器人的运动研究中。
以该研究中的无肢机器人(又称蛇型机器人)为例,通过弯曲身体的各个部分向左右弯曲,这种运动称为“横向波动运动”。如果机器人与障碍物相撞,它们必须通过调整身体姿态进行转弯或绕过障碍物。
想要完成这一任务,既可设计一个算法或控制系统,也可设计一个精巧的物理系统。
例如,通过安装力传感器在机器人的头部或身体上,设计一种算法,当机器人的头部或身体感觉到足够大的力时,让机器人远离或绕过障碍物。那么,这便是赋予了机器人一定程度的“计算智能”。
或者,通过设计机器人驱动身体的方式、选择制作机器人身体的材料等,使得机器人在与环境碰撞时自发产生身体的形变来应对障碍物而无需“思考”,这样机器人便具有了“机械智能”。
02
“机械智能”的秘密隐藏在驱动模式中
无肢运动是一种自然界里常见的运动模式,发生在各种不同且通常是高度复杂的异质环境中,并跨越了长度尺度和神经系统复杂度。
从数米长的、拥有超过一百万个神经元的蛇到微观毫米级别的、只有 302 个神经元的秀丽隐杆线虫。
当这些生物系统进入到陌生的复杂环境时(例如树林中的蛇、腐烂水果中的线虫),它们不需要任何时间观察、学习所在环境,便能自发地在环境中自由穿梭。
在生物运动学中,科学家已经在理解此种运动控制的“计算智能”方面取得了很大进展,包括神经回路的结构、功能和动态。
但仅仅具有计算智能是不够的,隐藏在这些生物系统身体里的“机械智能”也是它们能完成如此不可思议的运动过程中不可忽视的一部分。
目前,关于无肢生物系统运动的机械智能研究还较为匮乏。其中主要原因之一是,科学家们很难将身体机能与神经系统剥离开,在完全阻绝神经活动的情况下,去研究生物身体的在运动中的机理。
这便引出了开发机器人系统对生物系统运动研究的意义——通过构建“机器人物理学”模型,也即开发某种特定的机器人系统用于研究生物运动的机理。
科学家们可以在机器人系统中实现在生物体上难以完成的实验。举例来说,令一个蛇形机器人转弯 90 度极为简单,但控制一条蛇转弯 90 度则近乎不可能。
如果比较现今最前沿的无肢机器人系统和自然界中常见的无肢生物系统,非常显著的差异体现在身体驱动方式上:在几乎所有的无肢机器人中,每个关节的转动都是由一个旋转的电机来实现的。
而在无肢生物系统中,身体的弯曲是通过驱动各个关节两侧的肌肉收缩来实现的。王天宇察觉到,机械智能的秘密有可能隐藏在驱动模式中。
鉴于此,他和所在团队设计制造了一个名为 MILLR(Mechanically Intelligent LimbLess Robot)的新型无肢机器人。
MILLR 的每个关节的弯曲分别由两根独立控制的绳索驱动,可以向左右两侧拉动每个关节。
当一根绳索拉紧,它可以主动地将关节拉向一侧;而当一根绳索放松,这个关节在该侧便不再受到约束,可以被动地适应环境对其施加的力。
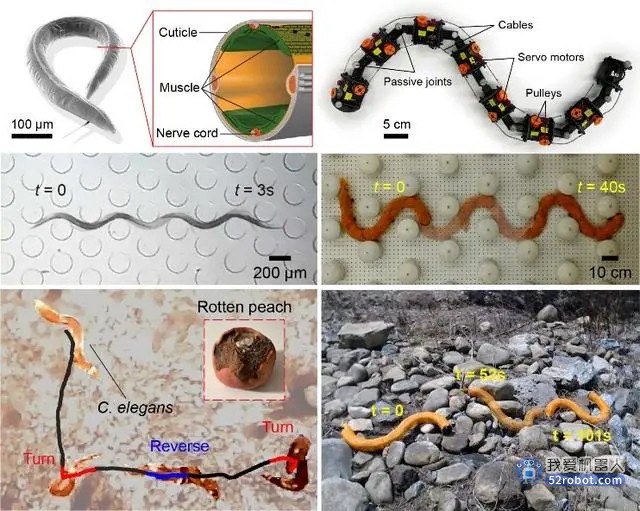
图丨用于理解机械智能的新型无肢机器人(来源:Science Robotics)
通过规划协调每一根绳索的拉紧-松弛运动,可以在 MILLR 上实现可编程、可量化、动态以及各向异性的身体柔顺性。
当机器人与障碍物碰撞时,根据不同的身体柔顺性状态,机器人可以选择性地保持身体形状或在障碍物施加的力影响下被动地弯曲。
正因为有了这样的身体柔顺性,很多本会导致机器人停止移动或卡住的碰撞,现在却自然地使机器人产生形变并服贴地通过障碍物,机器人也继而可以持续地推动自己的身体前进。
当在实验室搭建的多障碍物环境模型中测试 MILLR 时,王天宇发现,太低的身体柔顺性会导致 MILLR 被障碍物卡住,而太高的柔顺性又会导致身体不能保持需要的波动姿态,从而无法提供足够的动力前进。
只有当赋予 MILLR 适中的身体柔顺性时,在开环控制下它可以自发地在障碍物环境中前进,无需任何对环境的感知和主动的身体姿态调整,这也正是机械智能在 MILLR 上的体现。
同时,通过机器人实验和生物秀丽隐杆线虫在相似环境中的比对,发现当 MILLR 具有适中的身体柔顺性时,无论是开环的速度性能表现还是身体运动学表现均与线虫非常相似。
这也验证了一个生物学假设:仅依靠机械智能足以让无肢系统应对行动中遭遇的障碍物。
最后,通过为 MILLR 安装头部碰撞传感器,来实验探究线虫在运动过程中“倒退”行为的功能。同时,课题组发现,适当的计算智能可以弥补机械智能的不足,又抑或是与机械智能相互补充,从而增强运动性能。
至此,机器人系统 MILLR 成为具身智能的一种示例,展示了在机械智能和计算智能的协同作用下工作时,表现出的最强大的运动能力。
总结来说,这项研究强调了机械智能在塑造无肢系统运动中的作用,该研究为线虫和其他无肢动物的神经和机械控制之间的相互作用提供了深入的见解。
同时,通过机器人 MILLR,该团队验证了机械智能在无肢机器人运动中重要作用的,希望进一步推进无肢机器人在搜救、工业检查、农业和行星探索等领域的应用。
03
始于“副业项目”,却形成“机器人学-生物学”的闭环
另据悉,王天宇本科就读于上海交通大学密西根学院电子与计算机工程专业,随后在美国卡耐基梅隆大学获得机械工程硕士学位,现于佐治亚理工学院攻读机器人学博士学位,主要研究受生物学启发的无肢和多足机器人在复杂环境中的运动。
图 | 王天宇(来源:王天宇)
他谈到,该研究最初起源于硕士阶段科研的一个课题,即如何设计控制算法让蛇形机器人具有身体柔顺性以应对复杂的环境地形。当时,他用几千行代码实现了这个目标。
但当他看到生物可以看似毫不费力地实现这一目标时,他开始思考:是否在它们运动时,并没有“想”这么多?那么到底是什么让它们如此轻松的实现了计算机几千行代码才能实现的功能呢?
在他加入佐治亚理工学院攻读机器人学博士以后,发现课题组内以前便有过相关的研究,即对蛇如何利用肌肉的驱动以及身体的被动性来攻克障碍物。于是,他便产生了进一步制作机器人来模拟蛇用肌肉驱动身体的方式的想法。
与导师交流后,他的导师认为这个方向很值得探索,但由于当时这个机器人的项目并没有专项基金,便同意将此作为一个“副业”去尝试。
随着研究的不断深入和一些志同道合的伙伴们的加入,王天宇和所在团队发现,他们设计的蛇形机器人的某些行为和身体形态与他们观察到的线虫非常类似。
于是,这个项目进一步演化。不仅仅是由生物启发的机器人设计,反过来,也可以把机器人当成实验工具来更好地理解生物体的运动,从而形成“机器人学-生物学”的闭环。
尽管轮式、腿式机器人在运动能力上已经无出其右,但在实际应用场景中依然有一些特殊的环境。
这些传统的移动机器人难以派上用场。例如,坍塌建筑物的废墟中,纵横交错的管道系统中,土壤、沙子、雪等颗粒介质中,抑或是极端环境的冰川裂缝中。
然而,在此类环境中,无肢机器人却可以利用自己狭长身体来进行运动,完成搜索救援、工业排查、农业管理,甚至是外星球地质探索等一系列任务。
理解机械智能在无肢运动中的作用并不仅仅帮助他们更深层次地理解生物的运动,也可帮助设计制造出无需复杂传感和控制算法也能更好地应对复杂环境的无肢机器人。
未来,在机器人方面,他希望进一步拓展机械智能原理的应用范围,包括实现 3D 机器人的制造,使其能够完成更多步态,例如侧弯式、手风琴式等等。
另外,他们还正在制造防水的版本,开拓水下无肢机器人运动的研究范围。
在生物方面,该团队希望进一步研究生物体肌肉肌腱驱动的原理,加深对机械智能在生物体中表现的量化和理解。并且,本次研究所发现和验证的机械智能原理,有望延伸到蛇、鳗鱼等更多无肢生物系统中。
参考资料:
1.Wang T. et al. Mechanical intelligence simplifies control in terrestrial limbless locomotion. Science Robotics 8,85(2023). https://www.science.org/doi/10.1126/scirobotics.adi2243
2.https://ty-wang.github.io/
3.https://crablab.gatech.edu/
4.https://ty-wang.github.io/
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















