人形机器人产业再探讨:百尺竿头更进一步
技术革新+巨头入局+政策激励,多维度催化人形机器人落地
技术进步+巨头入局+政策激励加速 2023 年人形机器人产业发展。研报认为人形双足机器人为通用机器人的最优解,因为人类社会的种种事物都按照人类的生理结构进行设计,贴近人类形态的双足机器人更能适应种类多样的任务,达到通用的目的,隐形成本较小。

大模型帮助机器人思考学习,推动具身智能发展。各家厂商大模型不断进步提升人形机器人交互能力,推动具身智能发展。

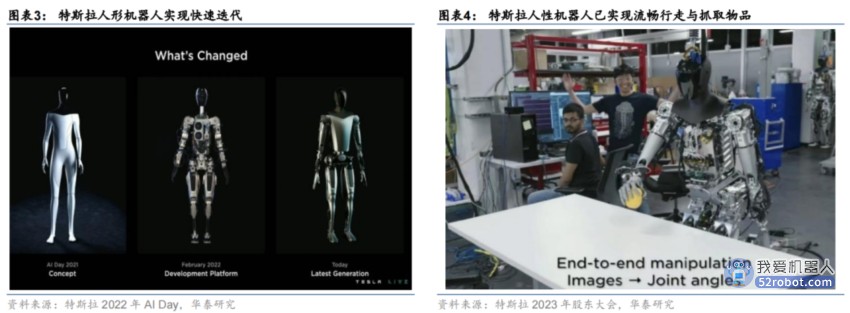
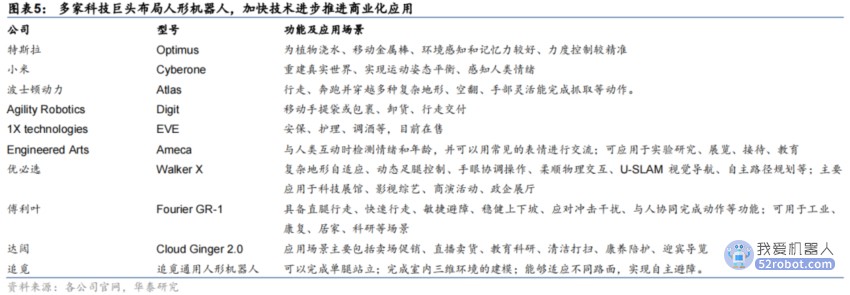
特斯拉机器人快速迭代,24 年有望在工厂投入使用。2021 年特斯拉在 AI Day 上首次提出其人形机器人 Optimus 的渲染图;2022 年 AI Day 上,特斯拉推出原型机,在没有外接线缆的情况下实现了缓慢行走与挥手;2023 年 5 月股东大会上,特斯拉人形机器人已经可以实现流畅的行走与抓取物品,灵活度较原型机大大提高。
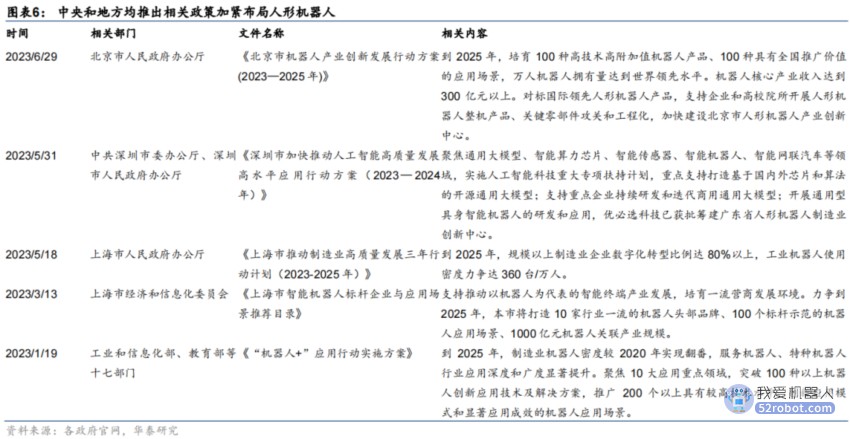
多方玩家布局人形机器人,百舸争流加快硬件变革。除特斯拉外,国内外多家公司积极研发人形机器人并取得快速进步,有望加速人形机器人硬件升级。
政策密集出台,加速人形机器人产业化进程。十四五以来,中央和地方陆续推出支持人形机器人产业发展的政策,如《“十四五”机器人产业发展规划》、《“机器人”应用行动实施方案》等,多地利好政策有望推动人形机器人加快工程化和产业化。
决策层:
大模型赋予机器人“大脑”,具身智能迎来曙光
大模型使机器人理解自然语言,增强泛化能力
大模型为机器人装上“大脑”,提升其理解能力与泛化能力。大模型的发展使机器人更容易理解人类指令并执行动作以完成更好的交互,人形机器人产业化进度有望加快。

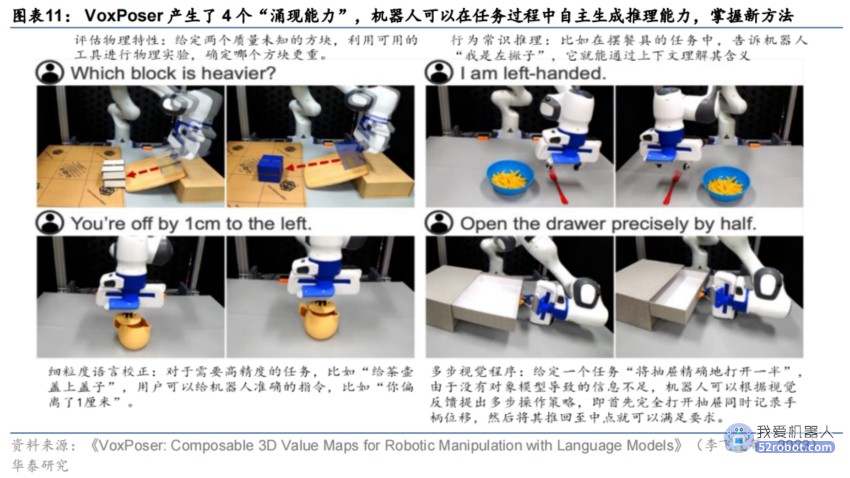
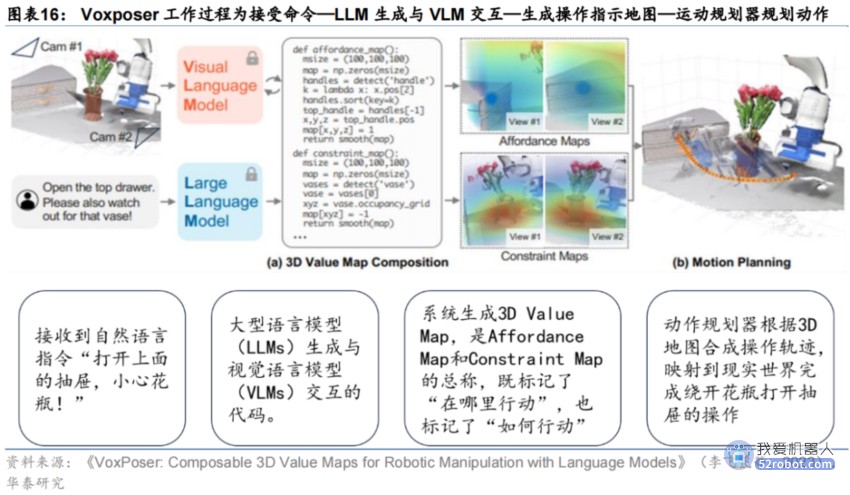
RT-2/VoxPoser 实现自然语言编程,机器人“善解人意”。RT-2/VoxPoser 的一大突破是使机器人可以理解自然语言指令,无需复杂的编程语言便可完成人机交互。

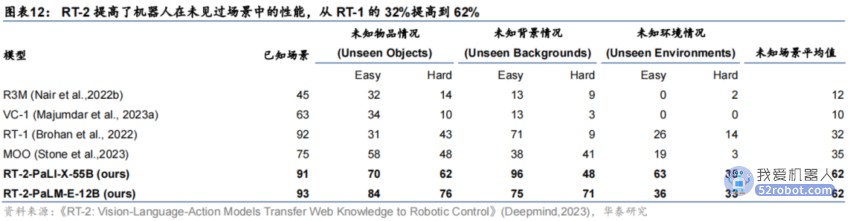
无需训练即可完成复杂指令且产生涌现能力,未知场景下 RT-2 模型泛化能力翻倍。新模型的另一大突破是无需预定义的运动原语或额外的数据和训练,模型泛化能力增强,加速机器人通用化。
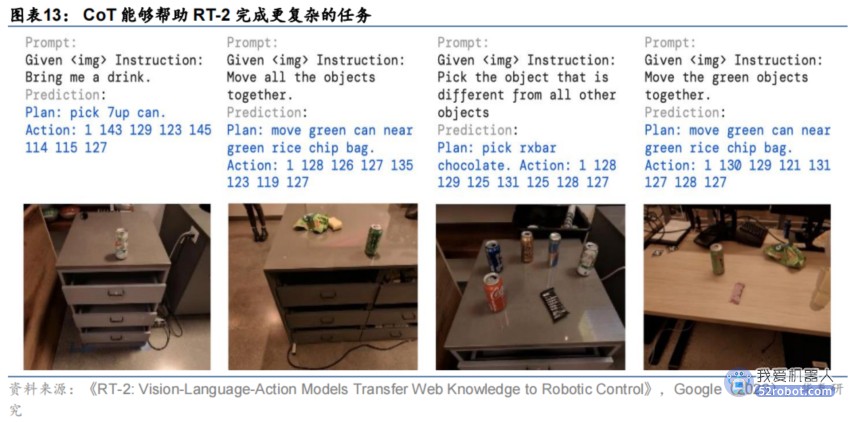
RT-2 泛化能力还体现在其思维链(CoT)助其进行多阶段语义推理,完成更复杂任务。DeepMind 研究团队展示了将思维链推理纳入 RT-2 中使其能够进行多阶段语义推理,最终通过实验结果可以观察到,具有思维链推理的 RT-2 能够回答更复杂的命令。
决策结果到运动控制映射方式改变,机器人实现“手脑协调”
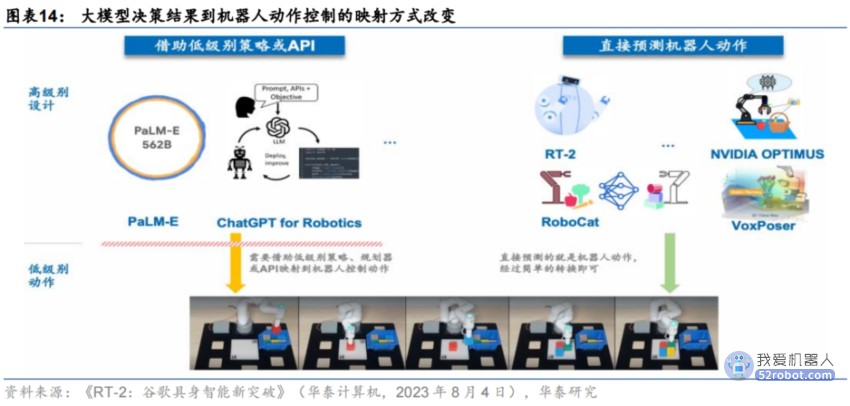
此前大模型产出的策略需要借助低级别策略或 API 才能完成对机器人的运动控制。视觉语言模型生成的结果到机器人动作的映射方式,主要取决于该预测结果的层级。
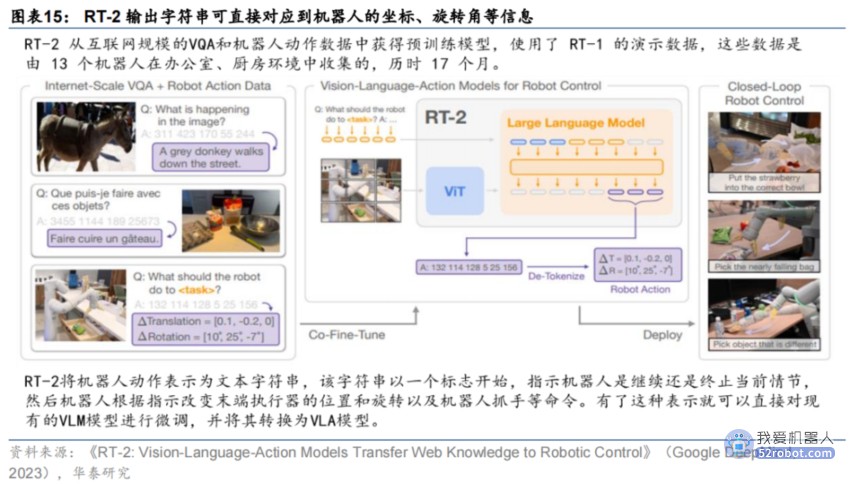
RT-2 输出字符串可直接对应到机器人的坐标、旋转角等信息。RT-2 动作控制采用的方法是将机器人动作表示为另一种语言,即文本 token,并与 Web 规模的视觉-语言数据集一起训练。
Voxposer 规划结果直接为机器人运行轨迹。Voxposer的动作控制实现过程是首先给定环境信息(用相机采集RGB-D图像)和自然语言指令,之后 LLM(大语言模型)根据这些内容编写代码,所生成代码与VLM(视觉语言模型)进行交互,指导系统生成相应的操作指示地图(3D Value Map),之后动作规划器将生成的3D地图作为目标函数,直接合成最终操作轨迹。
感知层:
聚焦力传感器应用,机器人知“轻重”懂交互
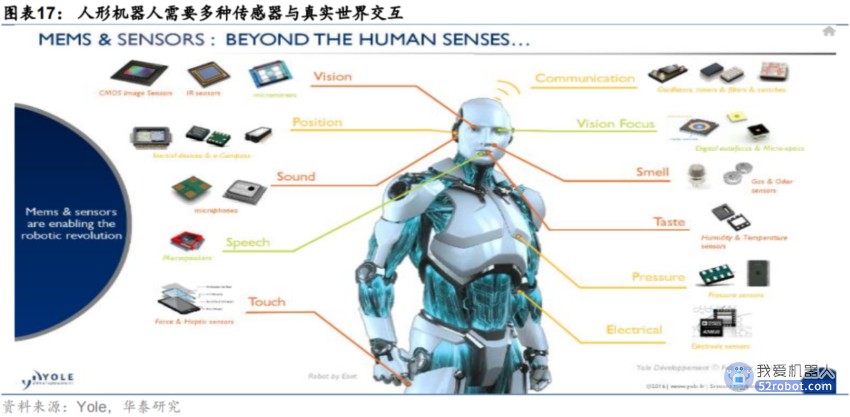
人形机器人需借助多种传感器识别自身运动状态和环境状况,收集多模态数据以供交互。
六维力/关节扭矩传感器为力控核心,使人形机器人知“轻重”
力传感发展仍处初期,六维力传感器和关节扭矩传感器是核心。在机器人多种感知中,力觉感知及对应的力传感器发展较慢,但其在人形机器人的运动控制中起重要作用,可以增强机器人本体感知及获取环境物理信息的能力。

六维力传感器精度高、获取力信息最全面。六维力传感器测量维度最高,可以提供最全面的力觉信息,其具有高精度、高灵敏度、快速响应、高耐用性和可靠性的特点,可以轻松检测到微小的力的变化,实时记录和传输数据,满足各种应用的需求。
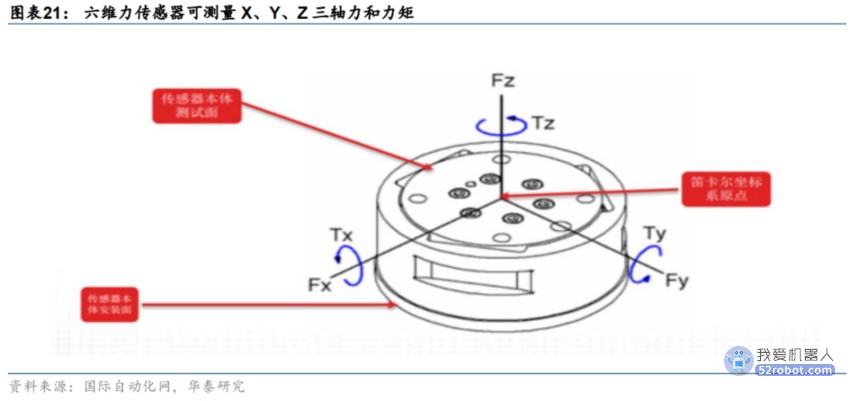
六维力传感器主要用于人形机器人腕部及踝部。六维力传感器可装载于机器人的腕部、踝部等核心关节处,让机器人知“轻重”、懂交互,真正实现类人的运动能力。

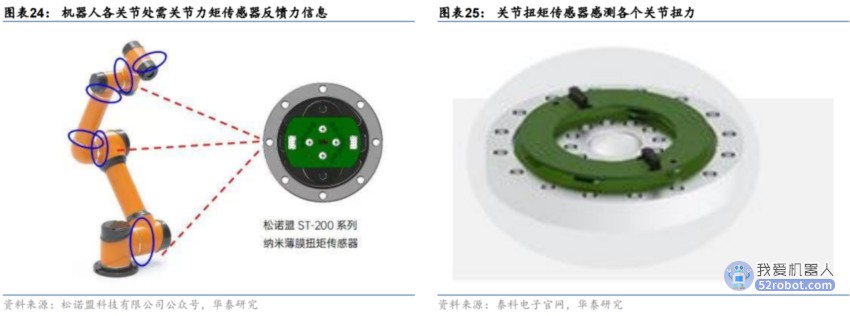
关节扭矩传感器增强机器人本体感知。关节扭矩传感器将扭转力矩引起的物理变化转换成精确的电信号,从而形成对机器人单关节力矩的测量和记录。
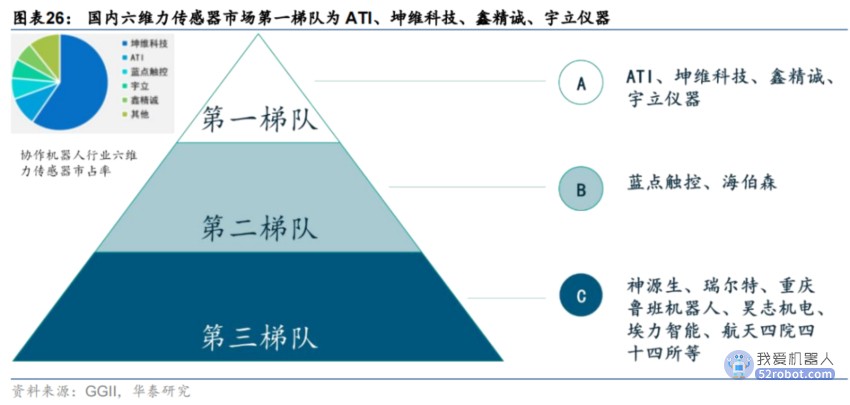
高价值高壁垒,六维力传感器面临动静态特性及解耦问题
进口六维力传感器价格昂贵,国内外产品在多方面仍存在差距。高性能六维传感器价格从几千到上万不等,价值量较高。国产六维力传感器与外资主流传感器在灵敏度、串扰、抗过载能力及维间耦合误差等方面仍存在差距。
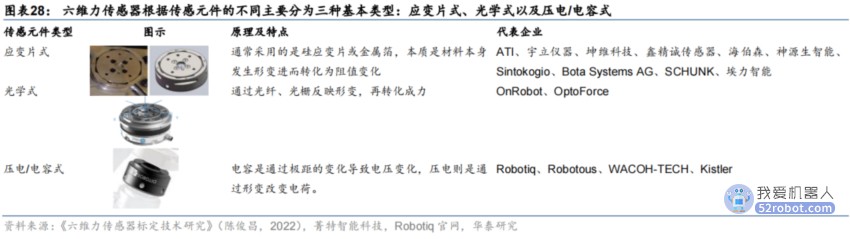
应变片式为当前六维力传感器主流,硅应变传感器在稳定性、信噪比、刚度方面表现较好。目前市场应用的大部分是基于应变片式的测量,其具有灵敏度高、测量范围大、可靠性高、技术成熟等优点。其中硅应变传感器在稳定性、信噪比、刚度方面有比较优势。
应变片式传感器的弹性体结构是关键,一体化和 Stewart 并联为主流。应变片式六维力传感器的弹性体结构设计是核心问题,传感器的结构受到其应用场合的限制,而力敏感元件的形式和布置直接影响传感器的灵敏度、刚度、动态性能、维间耦合等,很大程度上决定传感器性能的优劣。六维力传感器的典型结构设计主要是一体化结构(竖梁、横梁)和Stewart 并联结构。

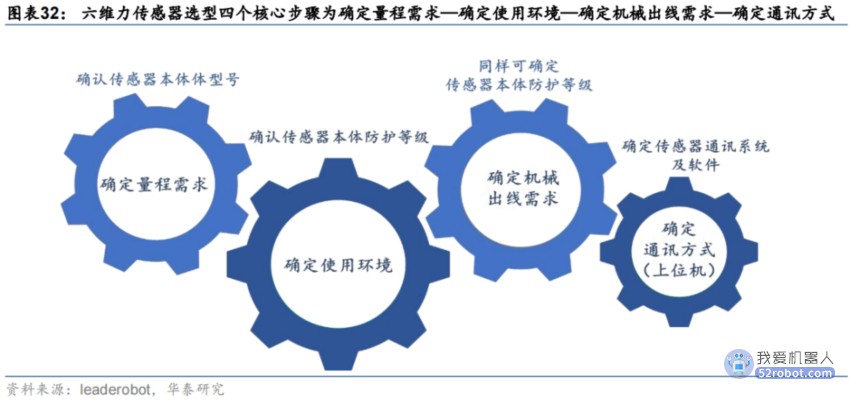
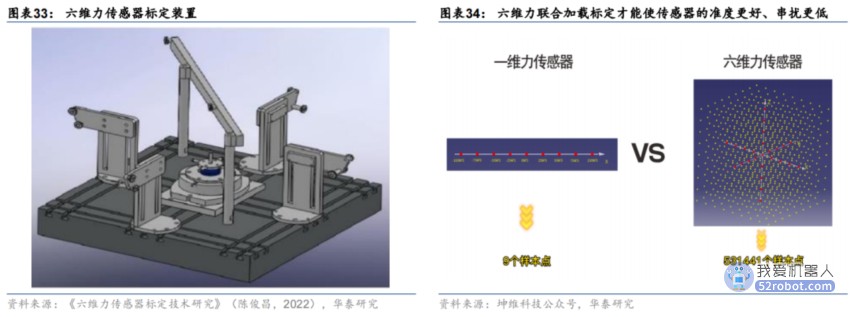
六维力传感器选型难度大,技术难点集中于保持优良的静态性能、动态性能和低维间耦合。未来六维力矩传感器需要六维联合加载标定设备等先进仪器、动态特性优化和矢量运算中的解耦算法解决技术难点。
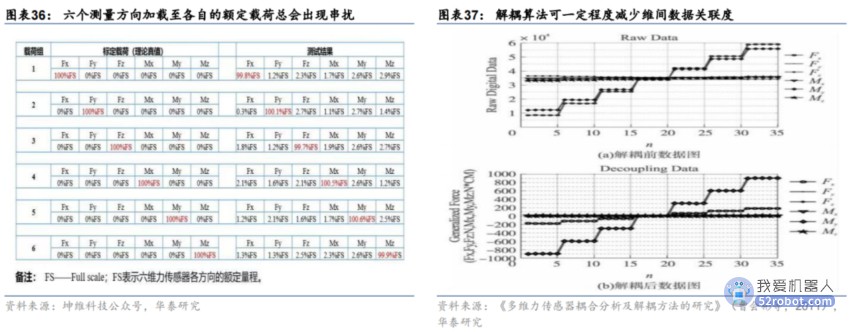
难点一:六维力传感器非线性特性显著,需要更为复杂的六维联合加载标定。现有标定装置存在较多局限性,如加载载荷有限、无法进行复合加载、无法加载所有维度正负方向、维间耦合较大等。这些局限性因素限制了六维力传感器标定的有效性,影响其最终使用精度,只有采用六维力联合加载标定,才能使传感器的准度更好、串扰更低。
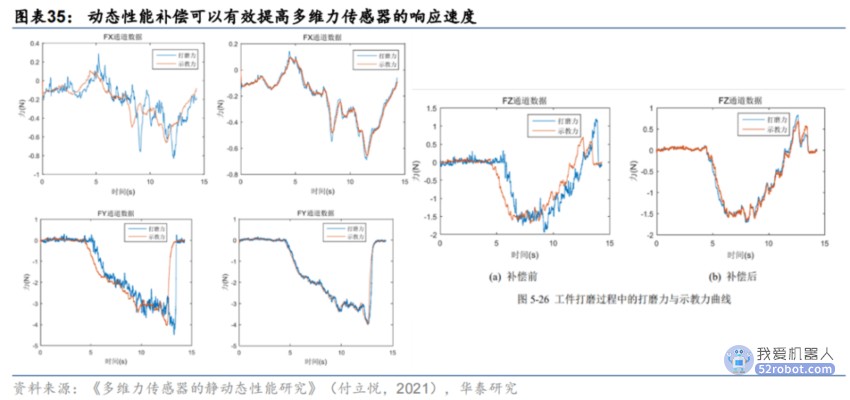
难点二:实际应用条件复杂,动态性能优化算法仍需提升。六维力传感器使机器人实现柔顺化、智能化控制,因此在动载荷下性能指标要求更高。
难点三:维间耦合问题无法彻底避免,解耦算法纷繁复杂。由于传感器的结构设计、机械加工的精度、贴片技术、应变片横向效应与检测方式等方面的原因,几乎每一维作用到传感器上的力/力矩分量都会对传感器的各路输出信号产生影响,造成维间耦合问题。因此需要解耦算法来对六维力传感器的输出进行解耦,消除维间干扰,提高传感器的测量精度。但当前对于多维力传感器的解耦问题并没有统一的处理方法,需根据实际情况及传感器结构进行选择和优化。
六维力传感器+本体感知带来机器人手部物品姿态估计新解法
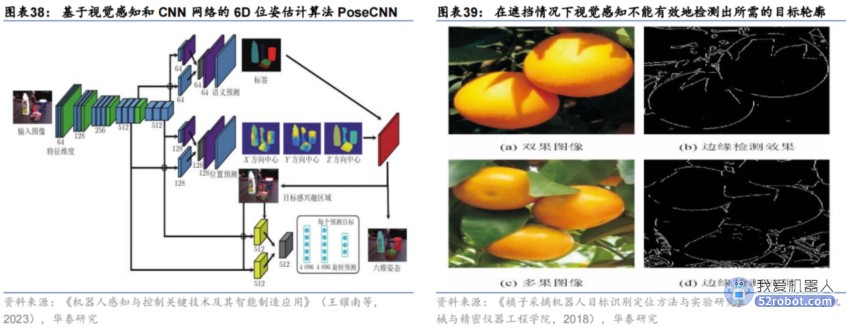
位姿估计是机器人领域重要问题,特殊环境下视觉反馈算法估计物品姿态可靠性较差。早期位姿估计算法包括模板匹配和特征点检测,前者预构建目标位姿模板库,检索得到最相似模板图像对应位姿;后者提取目标二维图像特征,构建关键点匹配后使用 N 点透视法解算。
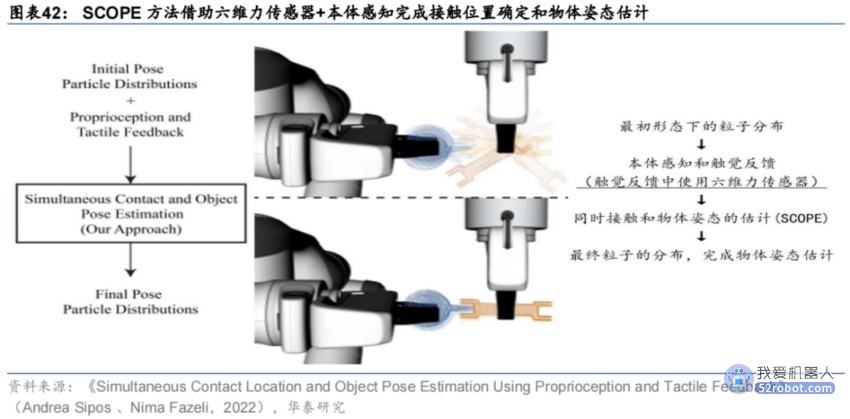
六维力传感器搭配本体感知提供机器人手部物品姿态估计新解法。密歇根大学机器人系的 AndreaSipos 和 Nima Fazeli 利用机器人本体感知(自身关节处扭矩传感器的感知反馈)以及手腕上六维力传感器的触觉反馈,并使用接触粒子滤波器算法,定位接触位置并估计物体姿态,简称 SCOPE,该方法可精确的完成接触位置的确定和物体姿态的估计,有望推动人形机器人的位姿估计能力。
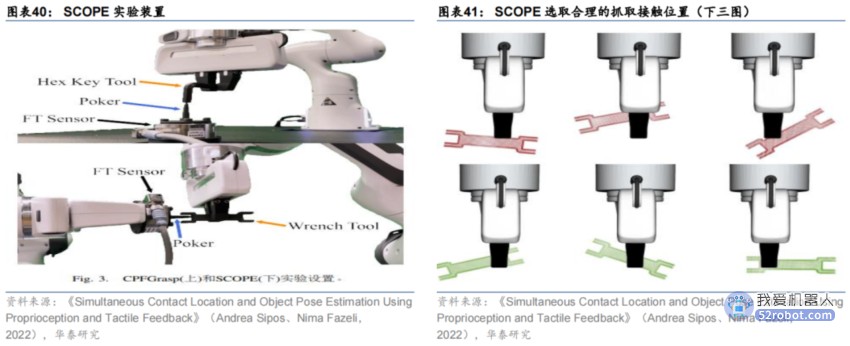
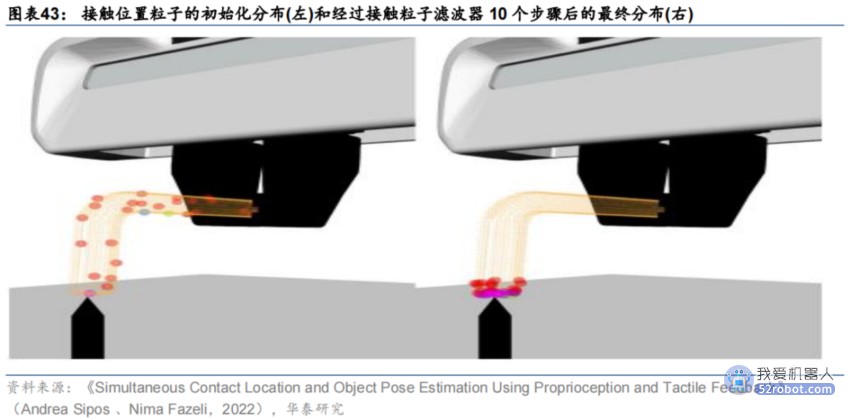
SCOPE 可精准确定接触位置,快速迭代估计物体姿态。SCOPE 方法是在接收到六维力传感器和关节扭矩传感器的信号数据后,使用接触粒子滤波器处理,完成物体姿态识别。在估计过程中虽然初始分布有较大的误差和高方差,但 SCOPE 可以在短短几次迭代中以低方差估计物体姿态。
使用接触粒子滤波器算法进行采样定位,提供准确力信息。现有的物体姿态估计信号处理算法可以分为三大类:几何匹配、概率方法和机器学习方法。目前主流方法是使用概率方法(粒子过滤器、SLAM 和蒙特卡洛方法等)来估计物体的姿势,其中粒子滤波器所需计算量小,且在非线性情况下表现较好,常被用于定位、跟踪物体等问题。
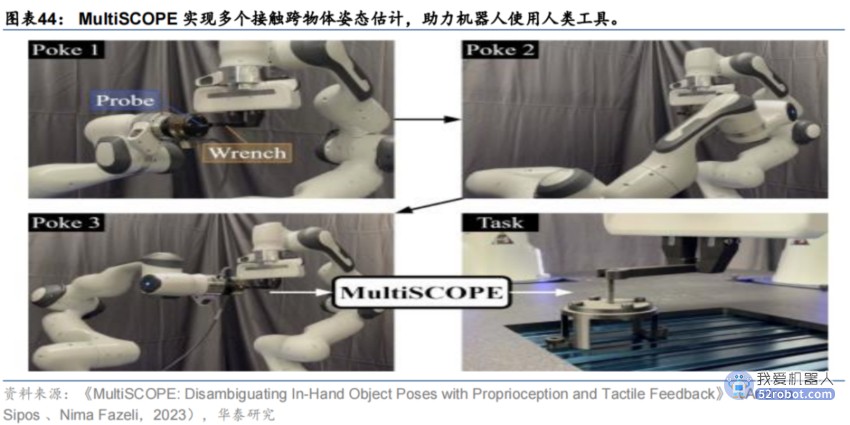
MultiSCOPE 实现多个接触跨物体姿态估计,助力机器人使用人类工具。Sipos 和 Fazeli进一步于 2023 年 6 月提出 MultiSCOPE,该方法使用本体感知和手腕处六维力传感同时估计两个物体在未知配置情况下被两个协同手臂抓取的姿态。该方法由单个物体的感知扩展到多接触的交互,实现了跨动作的物体姿态估计。
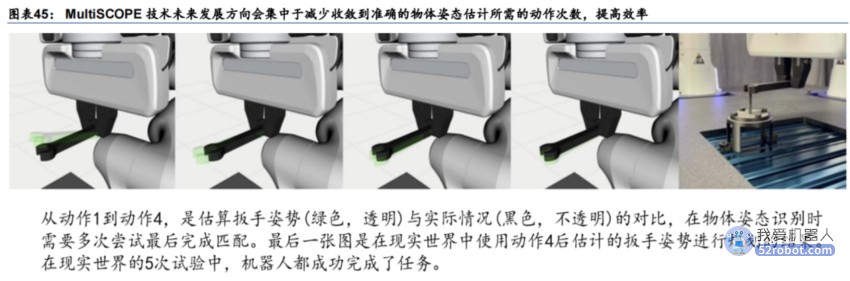
六维力传感器+本体感知技术使姿态估计向多模态+高效连续性发展。基于六维力传感器和本体感知的物体姿态估计技术为机器人感知并抓取物体提供了新解法。SCOPE 与六维力传感器的结合有望加快人形机器人实际应用。
执行层:
刚性驱动器方案成熟,准直驱方案渗透率有望提高
特斯拉采用成熟的刚性驱动器方案,未来准直驱方案渗透率有望提高。特斯拉采用的是最早推出,也是相对成熟的刚性驱动器方案。近几年新兴的准直驱驱动器技术发展迅速,未来有望替代传统的刚性驱动器。
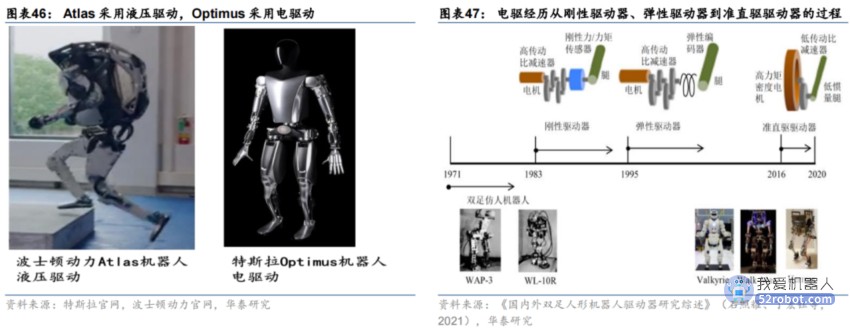
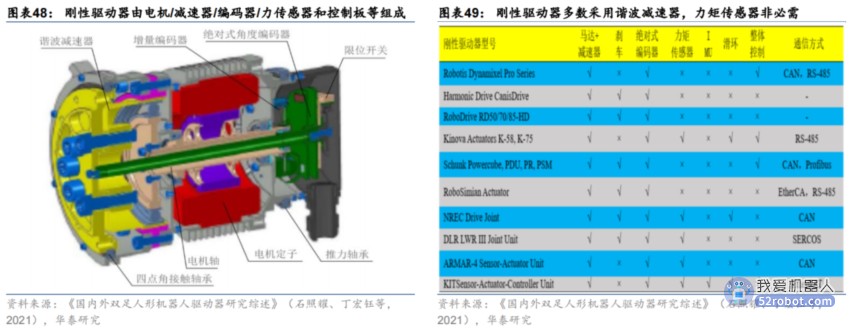
刚性驱动器技术相对成熟,整体设计较难创新。1983 年,早稻田大学研究出刚性驱动器(TSA),自此 TSA 在双足仿人机器人上广泛应用。TSA 整体设计方面已经较难有创新,在合适工作区间内的最大输出功率密度只能到 200-300W/kg,远没有达到动物肌肉的500W/kg,同时也解决不了机器人受外部冲击时零部件强度问题,目前的研究集中在优化设计上。
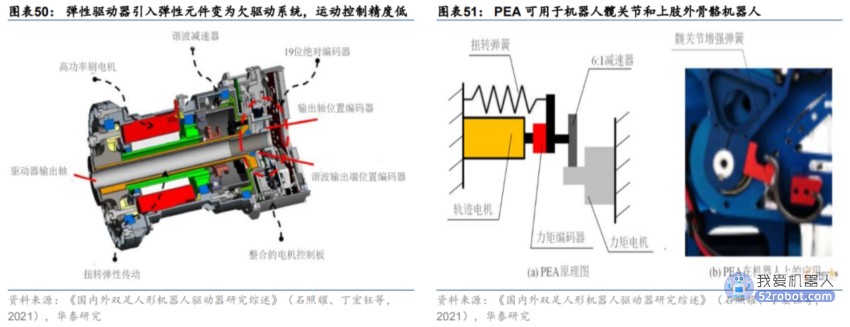
弹性驱动器技术路线多样,多数结构和控制复杂。弹性驱动器多在刚性执行器的基础上串联或并联弹性体。力矩测量上与刚性传感器较为类似。控制上,多数弹性驱动器方案结构与控制复杂,精度一般。
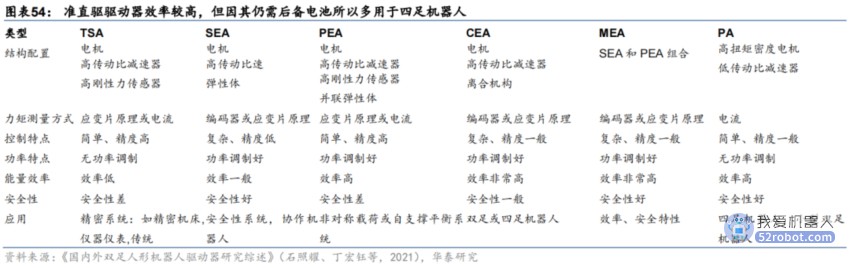
准直驱驱动器是新兴技术,编码器和电机功率密度为其主攻方向。2016 年 Wensing 等推出准直驱驱动器(PA),采用电机加低传动比减速器(如行星减速器)的方案,实现高带宽力控和良好的抗冲击能力。PA 未来主攻方向是编码器技术的创新和电机功率密度的提高。
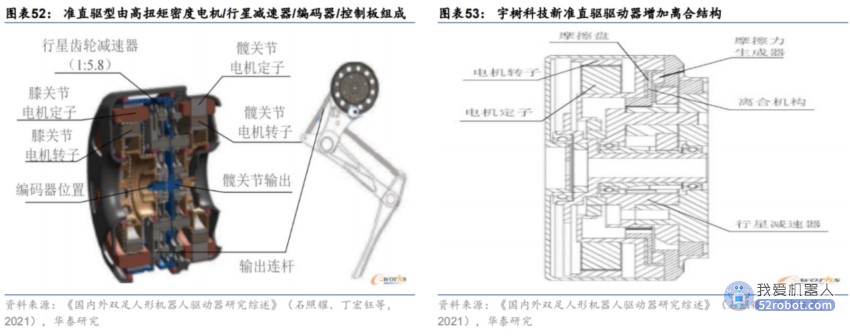
刚性驱动器 VS 准直驱驱动器,成熟系统 VS 高效新解法。结构布局方面,刚性驱动器是常规无刷电机驱动高传动比减速器,直接带动输出端,有些设计在电机端增加刹车,在减速器和输出端增加高刚性力传感器,准直驱驱动器是高扭矩密度电机驱动低传动比减速器,输出端具有小惯量特性;力矩测量方面,刚性驱动器是基于电流或应变片式力矩传感器,准直驱驱动器是应用电流环检测;控制方面,刚性驱动器控制相对简单,精度高,准直驱驱动器控制简单,精度相比刚性驱动器来说较低;能量特性方面,刚性驱动器的效率较低,而准直驱的效率较高。安全性方面,刚性驱动器的安全性比较差,准直驱驱动器由于具有反驱特性,安全性好。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















