“网红“波士顿的第一个工业级解决方案:搬运机器人Pick
关于波士顿动力,大家已经耳熟能详了,这位机器人公司中的“网红”,每隔一段时间,就会放出一段令人震惊的机器人视频。除了波士顿的研发能力被人称道之外,他们的什么机器人什么时候才能找到应用场景也是一直被人们所讨论。
软银公司在2017年以1亿美元收购了波士顿动力公司,英国软银Capital在去年6月和9月借给波士顿动力3700万美金经确认在今年1月7日开始转换为普通股,这些资本将全部被用来用于产品商业化推进。

波士顿动力早期的柴油动力自足犬型机器人Big Dog是以军用为目标设计的,此后的电动机器人则有其它各种不同的设计目标。去年多次出境的四足犬型机器人Spot Mini(上图)关注的是室内场景的导航和物理交互(上下楼梯、在家具中穿梭、开关门、抓取杯子)。
而根据今年的视频看来,波士顿动力显然开始打算在仓储场景发一发力。如果做好了,这一方向很有可能可以成为波士顿动力的盈利突破点。
最初的Handle机器人完全是人形,有双手,有一个大头,还有着极为优秀的运动能力。现在他们设计了新版的Handle机器人。
新版本Handle的体型更大,原来的双臂被换成了机器人头顶的大型吸盘式抓器,用来搬运箱子等货物,Handle主要靠脚上的双轮进行移动,臀部的配重会随之向前或向后摆动,保证机器人的平衡和稳定。
也就是说,新版Handle机器人变成了真正可用的机器,可以自动装载和卸载仓库中的货物箱。Handle在自动化仓库工作中可以跑来跑去,抓取货箱并堆叠成一大摞。
从技术层面来看,Handle可以搬动约15公斤的箱子,并且可以把托盘堆叠到大约1.2米深和1.68米高。机载视觉系统帮助Handle找到箱子并抓取,然后追踪Handle应该把箱子带往哪个托盘。Handle可以把箱子整整齐齐叠在一起。
这两天,波士顿动力继续公布了一个新的仓储机器人系统Pick。
Pick仓储机器人
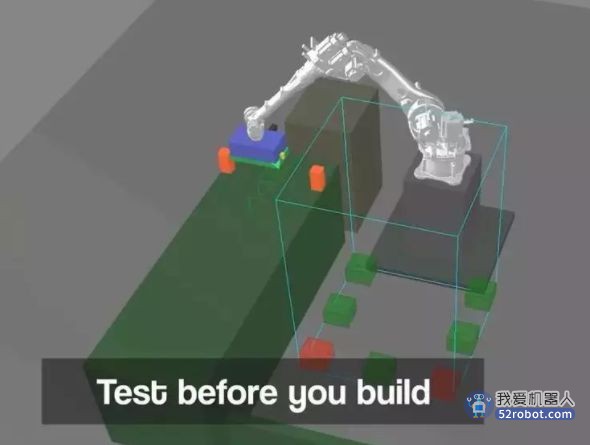
首先看起来就是一副可以在固定的位置上稳定工作、完全不需要人类担心的样子,它要用螺丝牢固地安装在底座上。这种运动灵活性的缺失不由得让我们旁观者觉得有些遗憾,但毕竟,作为工业机器人,牢固可靠才是第一位的。由于它的设计目标就是商用,波士顿动力也为它配备了图形化的虚拟调试环境,便于在正式使用之前进行充分的测试和调整。
根据波士顿动力介绍,Pick实际上是一个机器人系统,需要在机械臂工作区域的货物托盘上方安装一个具有深度感知功能的高分辨率摄像头,通过深度+RGB图像信号帮助系统定位货箱,然后它的核心功能就是从满的货物托盘上把箱子一个个搬运到传送带上(卸垛)。
波士顿动力宣称Pick是世界上首个使用深度信息的机器人卸垛解决方案(deep-learning based solution),并且波士顿动力的机器人一直都不依靠深度学习完成运动控制。摄像头独立于机械臂之外,这样的设计也可以便于机械臂实现尽可能高的抓取速度。根据视频演示,Pick的完成搬运一个箱子只需要大约3.7秒时间。
Pick的机械臂不仅可以稳定、精确地自适应抓取不同大小的箱子(大箱子和小箱子可以混在同一个垛中),对于倾斜的箱子也能稳定处理,还能转动箱子,把条码全部对准指定的方向(条码系统是现代仓储系统中不可或缺的功能啊)。
万事开头难,让我们期待波士顿动力越来越多的工业解决方案,真正从“网红”变成“明星”。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。













发布大中小件全兼容料箱仓储机器人方案")






