徜徉在人体里的微型机器人,未来将送药治病,大显神通!
在1966年上映的美国科幻电影《神奇的旅程》中,几位美国医生将潜水艇缩小到比红细胞还小,并通过血管把它送入大脑,来清除堵塞大脑的血块,最后成功拯救了一名科学家的生命。
从这部电影中,我们不难看出,用微型机器人治病的概念早就出现了。在过去,这种想法只能出现在科幻作品中,然而随着科技的发展,微型机器人植入人体的畅想也许马上就要实现了。
不久的将来,当我们在医院看病时,医生不需要开药和做手术,而是往我们的身体里注射微型机器人。这些机器人可以自由地在人体内穿行,疏通被斑块堵塞的动脉,进行活体组织检查,或者从内部治疗癌症和肿瘤。

“微小”的挑战
理想的医用微型机器人的大小和人类细胞差不多,相比于传统的医疗手段,比如:外科手术和导管插入等,微型机器人几乎不会造成人体组织损伤。通过瞄准体内特定目标、定向给药,微型机器人也可以大大减少药物副作用。
虽然医用微型机器人的好处多多,不过真的实现它可没那么容易。微型机器人和传统机器人的最大差别在于它们的体积非常小。“微小”的体积是一把双刃剑,在带来优点的同时,也带来了严重的限制。可注射到人体里的微型机器人的体积太小,无法轻易集成任何电源、传感器或计算机电路。一些大型机器人拥有的特点,比如:运动能力和人工智能等,微型机器人都很难具备。我们试想开头的微缩潜艇,跟细胞差不多大小的潜艇上无法安装电机,潜艇的螺旋桨也就毫无用处,而且出于对人体组织的保护,传统的机械驱动(如水下螺旋桨推进器)也不能应用在体内机器人上。在浓稠的血液中,潜艇如何前进就成了最大的问题。
另外,在微小的尺度下,与表面积相关的效应更加明显,这也进一步限制了微型机器人的运动。任何的物体都有体积和表面积,表面积与体积所成的比例很重要。一般情况下,物体越小,这个比例就会越大。因此,在微观尺度上,与表面积成正比的效应(比如空气阻力)影响更大,而与体积相关的效应(比如重力和惯性)所起的作用较小。例如,一些昆虫的体积很小,表面积与体积比较大,它们可以从高处坠落而安然无恙,因为昆虫下降时受到空气阻力的影响较大,因此,它们下落时的最终速度会大大降低。
除了体积小带来的挑战,微型机器人的生物可降解性和生物相容性也是关键因素。因为微小的异物不应该永久地留在人体内,不能让它们引起严重的免疫反应,所以任何进入人体的材料都需要严格的筛选。
激活微型机器人
面对挑战,科学家们想出了五花八门的微型机器人激活方法。第一种是声波驱动,振荡的声波作用在微型机器人周围的液体上,造成局部液体两侧的压力不同,使微型机器人移动。另外还有化学驱动,这种方法利用化学反应产生的微气泡,来提供推进力。
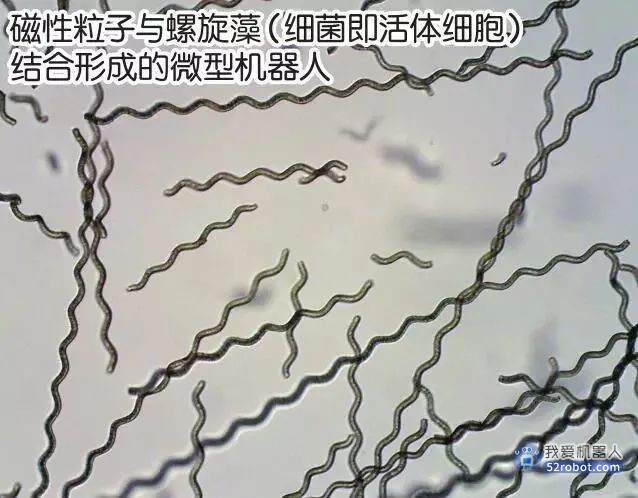
自身含有能量和移动能力的活体细胞也可以为微型机器人提供动力,比如:某些细菌和肌细胞等。工程师可以将活细胞与人工制造的微型装置结合在一起,通过改变周围环境的温度、酸度和光照条件等来远程控制它们。然而,这种方法的问题是它只能在受控制的环境中使用,并且人体环境的改变不能太大。
最受欢迎的机器人驱动形式是磁力。工程师将磁性材料嵌入机器人的内部,然后通过外部磁场操纵微型机器人。为了产生较大的磁场,工程师将可移动的磁体或者电磁线圈放置在人体外,磁场可以完全无害地作用于人体。改变磁场的方向和梯度,会对微型机器人施加力和扭矩(使物体发生转动的力矩),使其沿着期望的轨迹运动,磁场的方向和梯度的变化情况决定了微型机器人的运动方式。
旋转、滑动和滚动
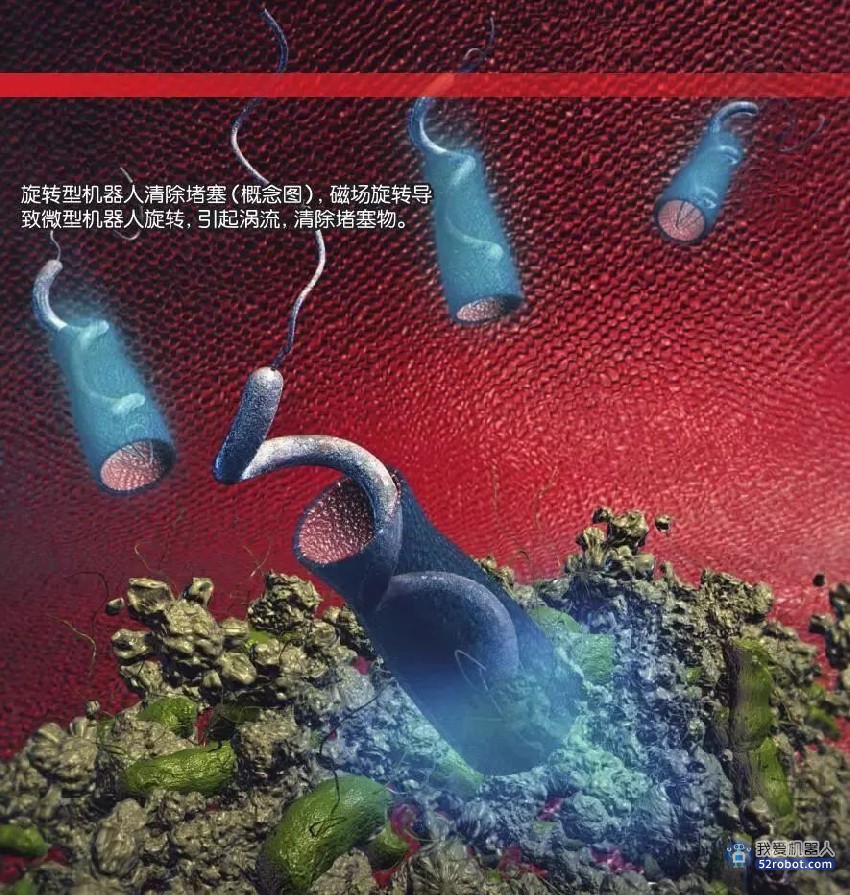
除了微型机器人的激活方式外,试验中的微型机器人的运动方式也各不相同。由于大部分人体环境是液态的,所以微型机器人需要具有在流体环境中运动的能力。一些研究人员从自然界中寻找解决方案,并注意到许多微生物都是利用鞭毛(长在某些细菌菌体上具有运动功能的蛋白质附属丝状物)来推动自身的。以鞭毛为基础设计的螺旋状微型机器人会在旋转磁场的驱动下,像螺旋钻一样,旋转前进。然而,旋转的运动方式适合液体环境,却不适合人体内的粗糙、粘性表面(比如胃黏膜)。
最普遍的一种运动方式就是利用磁力梯度让微型机器人滑动,磁力梯度会将磁性物体拉向磁场更强的区域。但是在粗糙的表面上,在磁力梯度作用下的滑动会受到很大的阻力,比如摩擦力。因此,虽然滑动在实验室中表现得很好,却不适合实际应用。
另外还有滚动(翻转)的运动方式等。既然旋转磁场可以用来旋转人造鞭毛,它也可以用来旋转薄块状的物体。制成长薄块状的微型机器人受到磁转矩的作用,会进行翻转,此时微型机器人的某一边与接触表面间的摩擦力,使这一边牢牢地“抓住”了表面,另一边则向前方翻转,微型机器人便开始前进了。通过这种运动方式,微型机器人可以在形如沟壑的胃表面自如地前行。

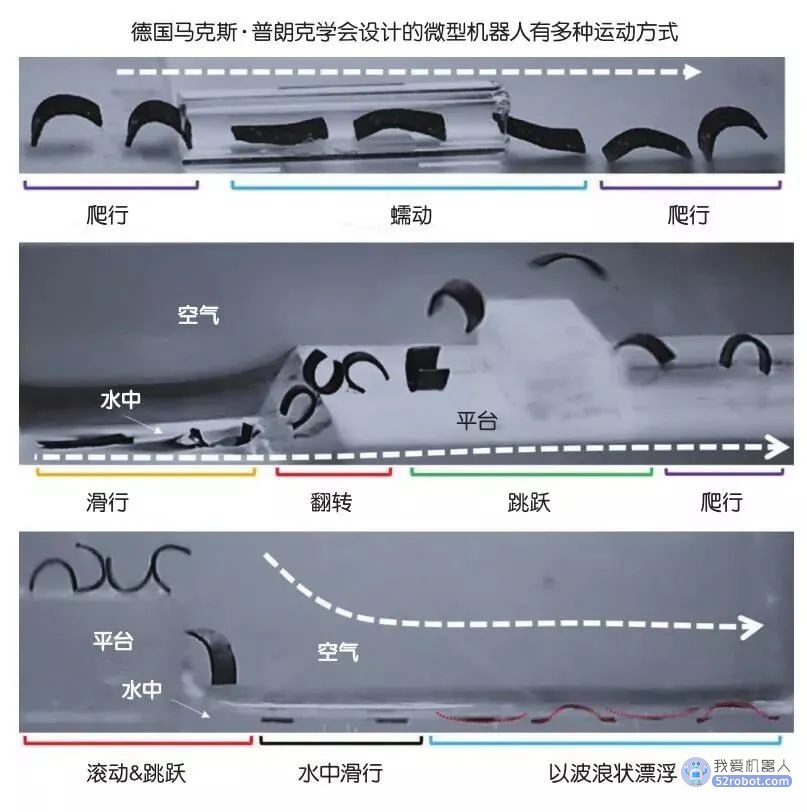
微型机器人既可以拥有一种运动方式,也可以拥有多种运动方式。例如,2016年,瑞士苏黎世理工学院的研究者就使用具有生物相容性的水凝胶和磁性纳米颗粒制作出了螺旋状的微型机器人,该机器人在磁场作用下,在液体环境中,以旋转的方式前进。而2018年,德国马克斯·普朗克学会设计的微型机器人既能够在不平坦的表面滚动、跳跃或者爬行,也能在液体环境中游动。与螺旋状微型机器人类似,该微型机器人在长度仅为4毫米(不到手指甲宽度的一半)的弹性硅片中嵌入了磁性粒子,研究人员通过外部磁场控制机器人的运动。
群体合作与执行任务
为了使微型机器人有更好的应用效果,科学家希望能够让一群机器人共同工作,就像蚁群一样。例如,多个微型机器人共同协作,可以携带更多的药物,进入人体。然而实现微型机器人的合作仍面临挑战,现在的磁场控制技术不能单独地指挥机器人分别运动,所有机器人都受同一个大磁场控制。目前,科学家正在研究小范围驱动的微型电磁场技术,希望在未来能够协调控制多个微型机器人。
当我们能够完美地控制和移动微型机器人时,下一阶段的挑战就是让机器人执行各种复杂的任务了。目前微型机器人只能做一些简单动作,比如推动、抓住物体。为了完成预想的医疗任务,微型机器人的操作能力必须得到提升。
随着微型化技术的进步,在不太遥远的将来,由微型机器人组成的团队会在血管中游动,探索身体的各个角落,并在行进中运送治疗药物、修复细胞。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









