自己找地缝?UC伯克利推出会打洞的「浪花蟹」机器人
这个机器人可以自己打个地洞钻进去。
自然界给机器人研发带来了很多灵感,近来模仿动物的「仿生机器人」层出不穷。人们通过观察动物,开发出许多具有特定功能的机器人。今天我们要介绍的是一个会自己挖地洞的小型机器人。

这个机器人的灵感来自于一种穴居甲壳类动物「太平洋蝉蟹」,也就是通常所说的「浪花蟹」。它还有一个别称叫「鼹鼠蟹」,因为它们会像鼹鼠一样在沙滩上垂直向下打洞,以躲避危险。
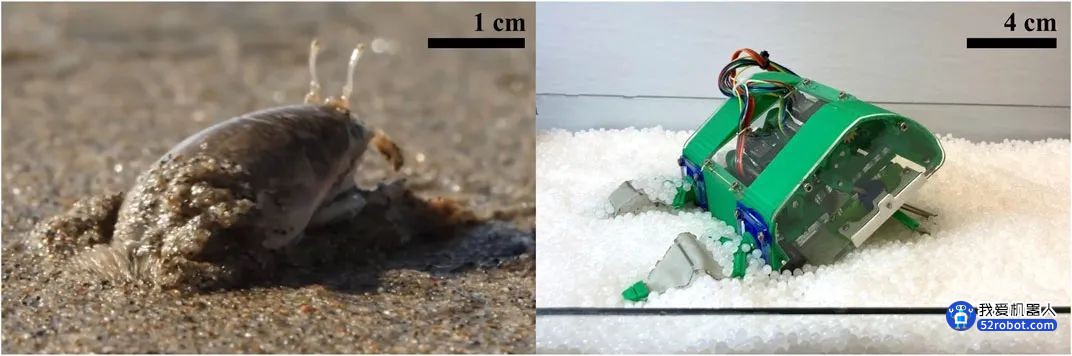
这种「会打洞」的特性引起了加州大学伯克利分校研究人员的注意,他们仿照浪花蟹研发了一个名为 EMBUR 的挖掘机器人,旨在用作评估农业场地土壤、收集海洋数据、研究建筑工地土质的工具。
该研究的主要作者 Laura Treers 介绍称浪花蟹的挖掘并不像看起来那么容易,因为挖得越深,挖掘土壤的蟹腿就越难收回,从而阻碍挖掘。
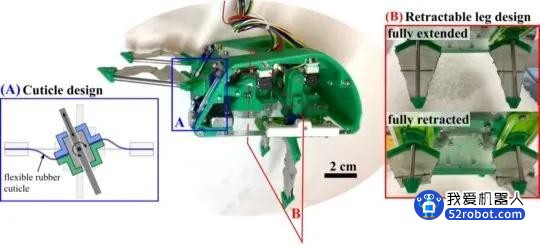
为了克服这一挑战并创造一个垂直挖洞的机器人,研究人员让机器人的腿具有各向异性的反应力,这意味着机器人在不同方向承受的力大小不同。就像游泳的人一样,机器人以柔软织物为材料的腿部会根据力量的方向和大小拉直和回缩。

另一方面,研究人员还需要设计一种方法来防止沙粒进入机器人的内部卡住机械部分。他们再次从浪花蟹身上找到了灵感。Treers 介绍说:「我们创造了一种角质层,类似于浪花蟹身上的关节膜。这是一种柔软、有弹性的材料,可以在保证机器人自由移动的同时防止沙粒进入内部。」
研究团队观察发现浪花蟹的 5 对腿可以分成两组,两组移动方向相反。该研究使用基于阻力理论(RFT)的建模技术来模拟腿部在挖洞过程中力的变化情况,最终研究者找到了最适合挖洞机器人的几何形状和行为控制方法。
Treers 指出:「虽然现有的机器人已经掌握了在陆地表面行动的能力,但它们都很难在地下环境移动,也很少有机器人能像 EMBUR 一样自行挖洞。
能够探索地下环境的机器人可用于各种行业和研究领域,包括测量潜在农业场地的土壤质量、岩土工程、海洋数据收集以及建筑和挖掘。此外,它们还可以用作海上交通工具或太空漫游车的小型展开锚,与其他类型的机器人协作。
此外,EMBUR 还能帮助我们研究一些难以在地下观察的穴居动物。
研究团队表示下一步将继续改进 EMBUR 的设计,以便进行更深入的挖掘,并探索更好的建模方法来预测机器人的行为,例如离散元方法(DEM)。研究团队希望这个机器人最终能够像动物一样在真实的海滩环境中挖掘、跑步、游泳。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















