受积木启发,诺丁汉大学研发由介电驱动单元驱动的软体机器人
大家是否还记得下图的仿昆虫多节机器人?它的特点之一是可以自我重组,从而胜任多项由个体单元无法完成的任务。而在软体机器人领域,也有类似的例子,例如今天介绍的由介电驱动单元驱动的机器人。
仿昆虫式的多节机器人
不同于常见的软件机器人所用的气动/凝胶块型驱动单元,来自英国诺丁汉大学的研究人员基于搭积木的思想,提出了一种可重构的介电驱动单元,这种介电驱动单元可以像组装积木一样组装成软体机器人手,还可以组装成软体机器人,极大地提高了介电驱动单元的应用场合。
该项工作以论文的形式发表在Wiley出版社的期刊ADVANCED SCIENCE上,论文信息:Atia, Mohamed GB, et al. “Reconfigurable Soft Robots by Building Blocks” (DOI:10.1002/advs.202203217)
▍受积木启发的介电驱动单元
研究人员受积木玩具启发,将介电驱动单元组装起来,即每个驱动单元可以独自被驱动,也可以串联起组装成一个更“全面”的驱动器或者是机器人,该项技术的提出使串联起来的驱动器的导线数量大大减少,也拓展了驱动单元的应用场合。

基于积木的可重构模块化软体机器人概念
首先,为了增大驱动单元的弯曲变形和输出力,研究人员对驱动单元结构进行了优化设计,获取了驱动单元形状和输出位移之间的关系:
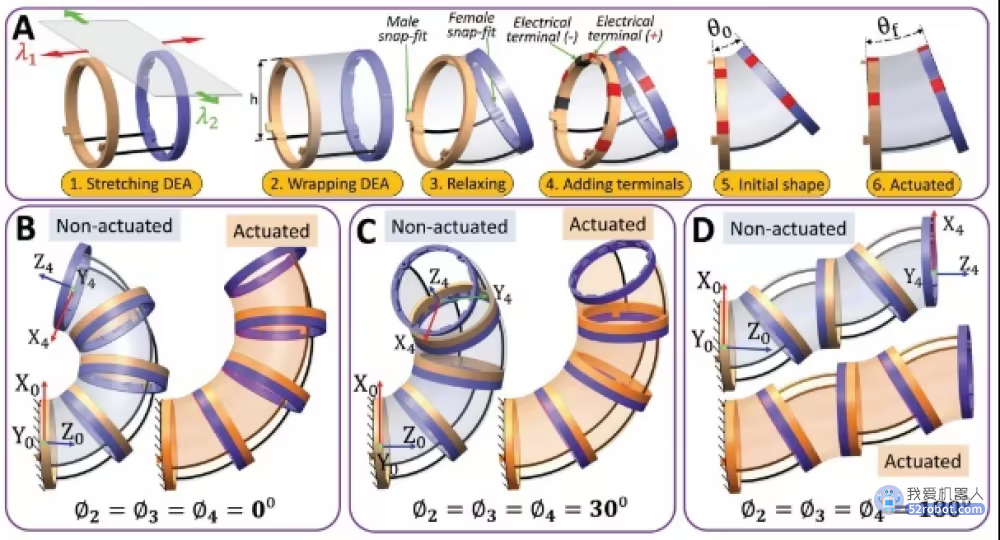
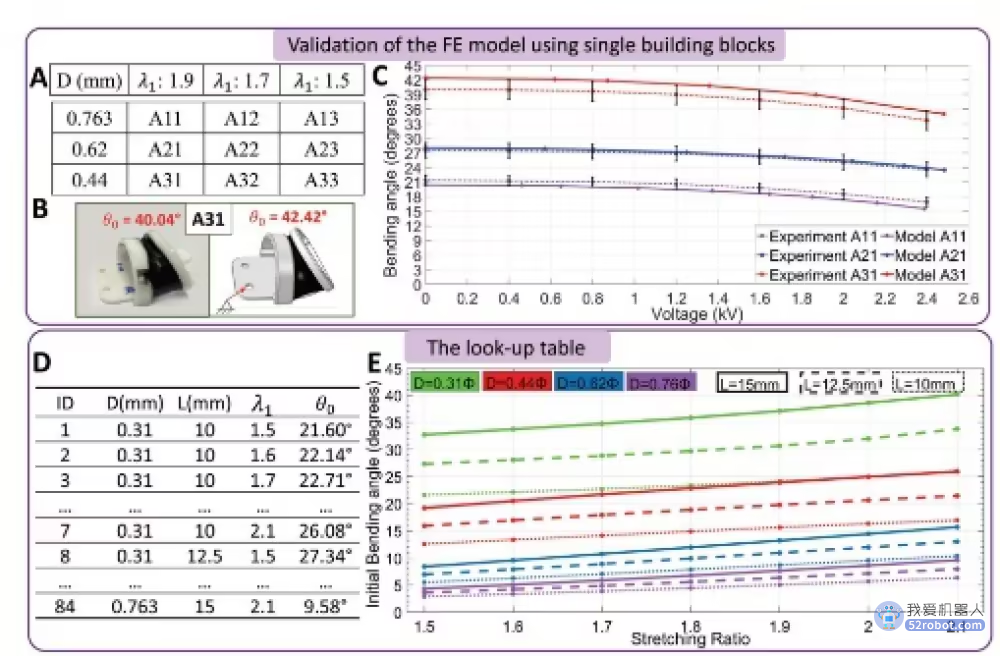
研究人员提出的可重构介电驱动单元结构优化设计
正如设计初衷,这种可重构的介电驱动单元可以像搭积木一样一层一层垒成介电软体驱动器,这些“积木”是通过卡扣而机械串联起来的,单个驱动单元重量在0.9-1.1g之间,而且每个驱动单元可以实现伸缩、扭转和弯曲输出运动。


介电驱动单元与软体机器人手的组装
形象的说,组装介电驱动单元,相当于将每一个噪音低,能耗低,重量轻和成本低的驱动单元个体进行合体,可以大大拓展其应用场合。
相比于其他常用作驱动器的材料,介电驱动单元无论是在致动应变,致动压力,还是在能量密度的方面都类似于天然肌肉:
▍多功能软体机器人


介电软体机器人手抓取操作(目标物体为 18.3g)
软体机器人手不但可以实现轻质量目标的抓取,还能组装起小房子,展现了该类软体机器人手灵巧的操作能力:


介电软体机器人手组装姜饼屋
同时,在软体机器人的仿生设计领域,自由度高而且负载能力大的象鼻是软体抓取手的经典仿生对象。不同种类和功能的肌肉共同作用使得象鼻能完成弯曲、扭转以及各种耦合的动作,十分灵活。
为了证明这种驱动单元具备以上的能力,研究人员利用驱动单元搭建了象鼻软体抓取手,成功展示了软体抓取手对目标物体的无破坏性抓取,这也是软体抓取手相较于刚性抓取手的一大优势所在。


象鼻软体抓取手抓取花朵
相比于温度控制型的智能材料驱动器,介电驱动器的一个优点是响应速度非常快,甚至在几十或者上百赫兹的驱动频率下仍能产生较大变形。这一特点有利于增加软体机器人的灵活性,可以实现对软体机器人不同运动模式或功能的快速切换与控制。
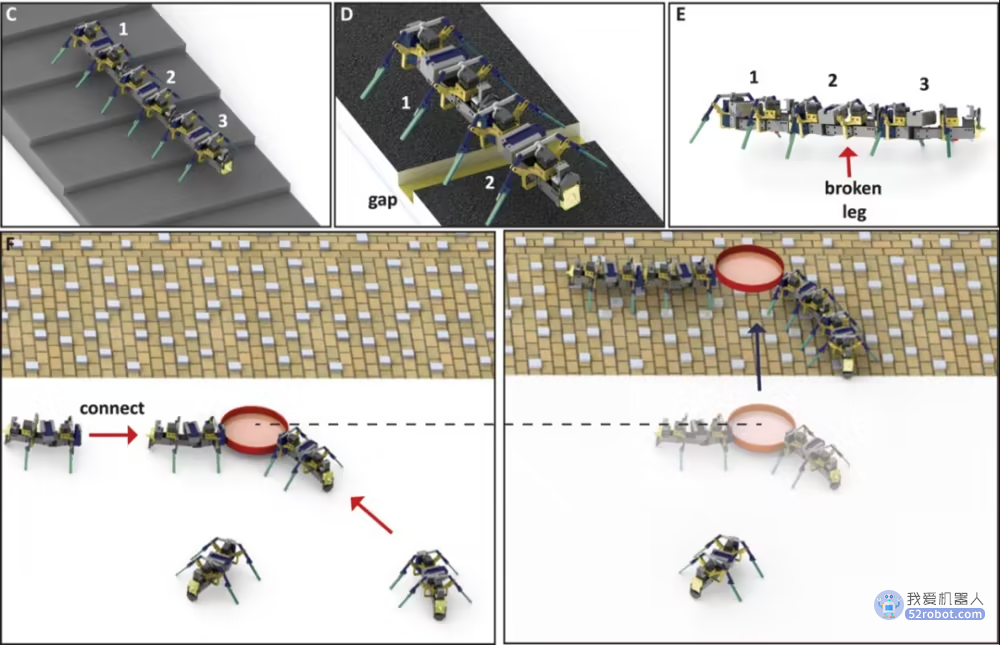
因此,研究人员将这种驱动器组装成软体机器人,通过控制驱动器(机器人腿)的电压时序信号,控制机器人分别实现的循迹前进(速度为2.1mm/s)和转弯运动:
软体机器人的结构


软体机器人的前进和转弯运动
以上的三种介电驱动器的应用证明了该类可重构单元的介电驱动器可以满足多目标任务的需求,这种可重构性的驱动元件给驱动器带来了互换性,也拓展了其应用场合。
▍介电驱动单元的优越性
通常而言,介电驱动单元是由介电高分子薄膜和薄膜两侧的电极组成的“三明治”形复合结构,类似于平行板电容器,当施加电压时,膜的两侧电极上会产生并积累电荷,同一表面上电荷之间相互排斥,异面电荷相互吸引,产生 Maxwell 应力从而导致薄膜沿电场方向收缩以及薄膜面积的增加。
而研发新型介电材料以降低介电驱动器的驱动电压,使其方便应用于可携带和穿戴设备当中,是未来的一个研究方向。
介电驱动单元变形原理(类似于压电材料逆压电效应)
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















