精密减速器:人形机器人关键零部件,产业格局解析
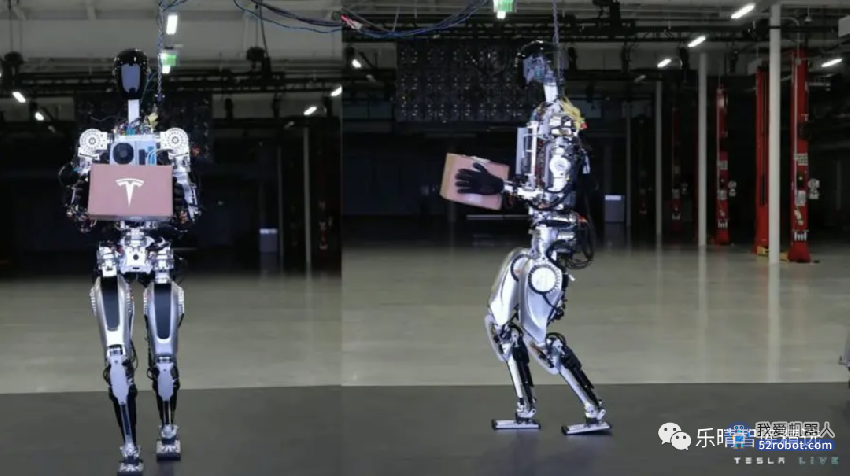
特斯拉Optimus将搭载约40个执行器,“电机+减速器”的集成有望成为人形机器人大关节的主要动力组合,减速器需求空间将被打开,而指关节部分因体积、重量等边界条件限制,可能采用更加轻量化的技术路径。
作为机器人的核心零部件,减速器、伺服系统和控制器的国产化率目前仅为36.53%、24.50%和31.20%,而这三部分是机器人实现精密运动的核心保障,对产品的最终性能起决定性作用,是国产化进程的主攻方向。
在零部件中占比最高的减速器,是连接动力源和执行机构的中间机构,具有匹配转速和传递转矩的作用,可分为一般传动减速器和精密减速器。
一般传动减速器控制精度低,可满足机械设备基本的动力传动需求。
而精密减速器制造要求高、技术难度大,具有精度高、可靠稳定、回程间隙小等优势,应用于机器人、数控机床等高端领域。
01
精密减速器行业概览
精密减速器类似于工业机械的“肌腱”,连接了伺服电机和执行机构,电机一般高转速+低扭矩,因此减速器的核心作用是降低转速+提升扭矩,从而精准调节机器转动角度。
精密减速器是配合电机使用的器件,在人形机器人中的用量基本和伺服电机数量一致,将远高于现有工业机器人(单机减速器用量2~6台)。
精密减速器是具有特定功能的机械部件,有其成套技术、成套装备和工艺,基于此生产出的减速器、电机和传感器构成了机器人的关节单元。关节单元再构成机器人,最终,机器人为用户使用。
精密减速器的技术生态包含减速器本身的技术、减速器与关节单元协同、减速器与机器人整体性能协同的三个层次。
精密减速器主要包括谐波减速器与RV减速器。
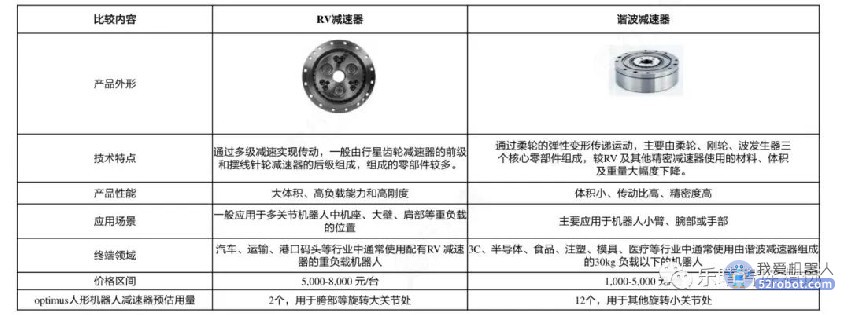
整体来看,由于谐波减速器承载力有限,但重量、体积较小;RV减速器具有更高的承载力,但重量、体积较大,因此两种减速器短期内呈现互补、而非替代关系。
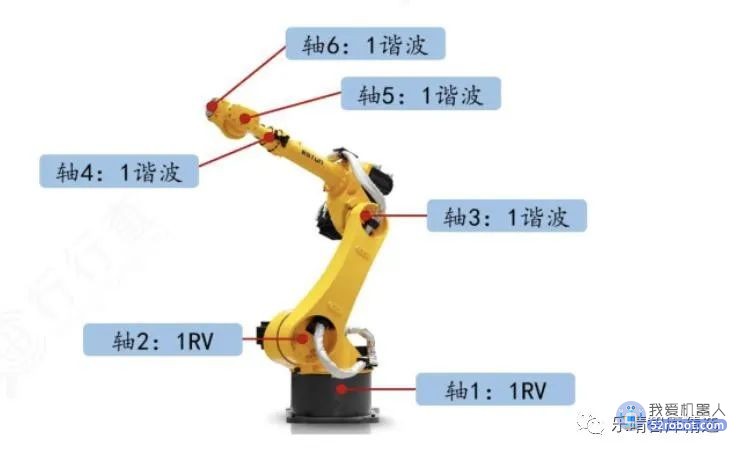
一般来讲,负载10kg以下工业机器人主要使用谐波减速器;10-20kg高负载的工业机器人小臂、手腕关节可以采用谐波减速器;负载30kg以上的,在其轻负荷的末端关节上也能够使用谐波减速器;而如基座、大臂、肩部等重负载部位多使用RV减速器。
六轴机器人通常使用2个RV+4个谐波:
资料来源:绿的谐波
根据MIR数据,受益下游工业机器人等行业高景气,国内谐波和RV减速器销量有19年的54.3万台增长至22年的126.3万台,期间CAGR为32.5%,预计23-25年将继续以16.8%的CAGR增长超过200万台;结构性看,工业机器人为减速器第一大应用领域,22年占比为79.7%。
02
谐波减速器
谐波减速器由波发生器、柔轮和刚轮组成。
小型轻质的谐波减速器在机器人领域可应用的关节相对较多。
柔轮是谐波减速器关键部件,在谐波减速器运动中不断变形,容易发生疲劳断裂。
因此提升柔轮精度、保持寿命已然成为柔轮设计和热处理工艺最为关键的目标,其原材料、齿轮齿形设计以及热处理工艺都会对其性能产生影响。
当波发生器被放入柔轮内圆时,柔轮产生弹性变形弯曲成椭圆状,且由于柔轮外侧的刚轮比其多2个齿,导致柔轮长轴部分正好可以与刚轮的齿轮啮合,而短轴部分与刚轮的齿轮呈脱离状态。
由于刚轮固定,因此在波发生器逆时针转动时,柔轮作顺时针转动。当波发生器持续转动时,柔轮不断发生变形,两轮轮齿在啮入、啮出的过程中进行错齿运动,波发生器转动180°,柔轮正好转动一个齿数,其转动角度之比即为减速比。
谐波减速器下游应用中,各类机器人占80%,大幅高于机器人在伺服系统下游应用中的占比。这意味着人形机器人对减速器市场规模的拉动作用将更明显。
代表厂商中优必选WalkerX每条腿使用了6个谐波减速器,而美国敏捷机器人Digit每条腿会使用4个谐波减速器。
谐波减速器原理图:
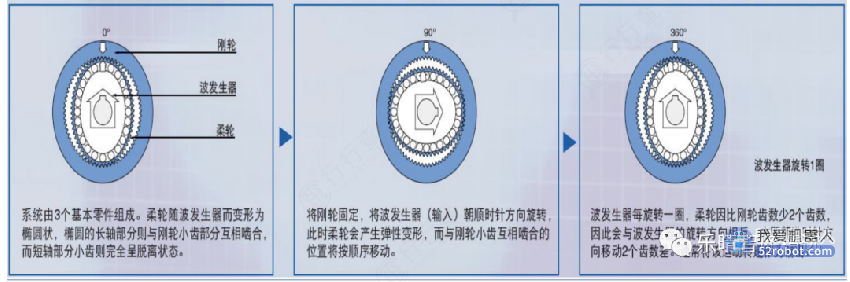
资料来源:哈默那科官网
03
RV 减速器
RV减速器与谐波减速器一样,具有精度高、单机传动比大等特点;但相较于谐波减速器,RV减速器组成更加复杂,导致体积和重量较大,且由于不存在变形运动因此具有更高的刚性和扭矩承载能力,主导重负载精密减速器领域。
RV 减速器由两个减速部构成,在第一减速部中,输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速;在第二减速部中,有一个曲柄轴与直齿轮相连接,在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮,曲柄轴会带动RV减速机做偏心运动,当曲柄轴转动一周,RV齿轮就会沿与曲柄轴相反的方向转动一个齿,从而达到减速效果。
RV减速器由于传动精度、扭转刚度等性能差距仍然依赖进口。
04
精密减速器市场格局
从全球竞争格局来看,全球机器人减速器市场呈现高度集中状态,几乎被哈默纳科和纳博特斯克垄断。
《工业机器人减速器市场分析与产业供需格局研究报告》显示,日本纳博特斯克是生产RV减速器的世界巨头,约占60%的全球减速器市场份额。
哈默纳科在全球范围内谐波减速器领域处于市场主导地位,依靠长期的研发技术积累、规模化的生产能力、稳定的产品质量和性能持续保持竞争力,约占15%的全球减速器市场份额。
除此之外,日本住友RV减速器和新宝谐波减速器合计占全球10%市场份额,全球减速器市场呈现出日本企业高度集中的局面。
谐波减速器技术壁垒较高,在基础材料、设计、加工工艺、加工设备等方面均具有较强护城河。
作为技术密集型行业,先进入者依靠其工艺技术和加工经验等具备先发优势。
国内减速器市场得益于绿的谐波、双环传动等龙头的带动,近年来国产化率持续提升。
从产品类型来看,国产谐波减速器替代相对明显,目前已涌现如绿的谐波、来福等优质厂商,仅绿的谐波已达到25%的市场份额。
根据高工机器人研究统计,谐波减速器方面,2021年日本哈默纳科和新宝在中国的销量市占率分别同比下滑1.5pct和1.6pct,绿的谐波销量市占率同比提升3.7pct。
RV减速器方面,2021年纳博特斯克在中国的销量市占率同比下滑3.0pct,双环传动销量市占率同比提升5.75pct。从产品类型来看,技术难度相对较低的谐波减速器国产化进程相对迅速。
国内主要厂商包括双环传动、秦川机床、中大力德、南通振康、珠海飞马、智同科技等数家企业都在大力发展国产RV减速机产品,但在转动精度和传动效率上距离国外产品尚有一定差距。
减速器竞争格局:
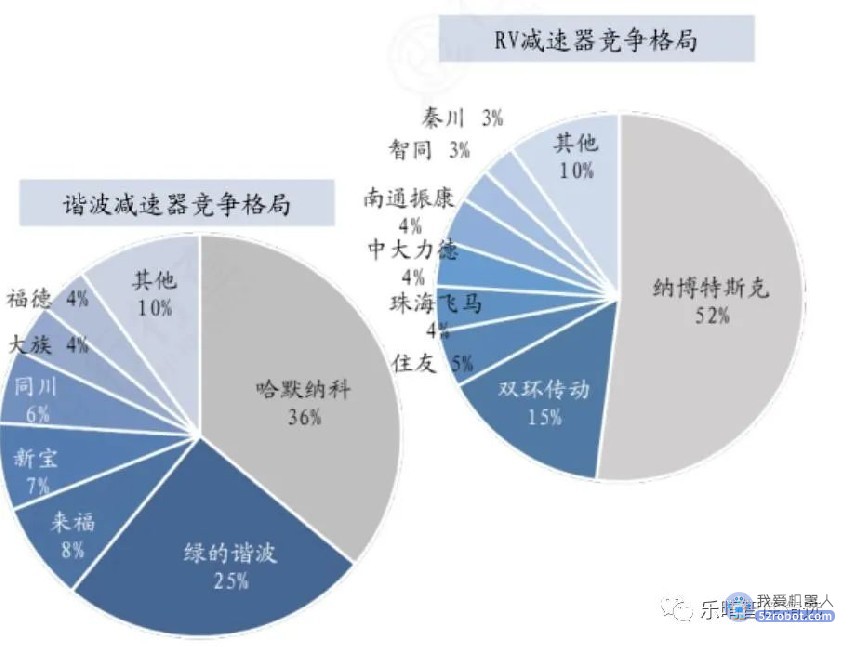
资料来源:GGII
未来若人形机器人得到普及,精密减速器、特别是谐波减速器市场需求有望较当前大幅增加,国产减速器厂商有望获得更大的市场份额。产能端来看,人形机器人关节数量增长带来减速器需求量边际提升,具备快速扩产能力的厂商有望优先获得较大份额,国内厂商在扩产成本上备具一定优势。成本端来看,人形机器人对硬件成本更为敏感,国内厂商具备性价比优势。
而未来机器人采用机电一体化关节设计已成为重要发展方向。一体化的机器人关节设计是将精密减速器、电机及驱动器、传感器等组成一个基本的传动单元,可以提高机器人的灵活性,减少制造时间和总体成本。在机器人产业链整体量价齐升的前提下,各环节有望迎来广阔的国产替代空间。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















