手握鸡蛋而不碎,工程师开发出突破性的“机器人皮肤”
不列颠哥伦比亚大学近日和本田研究人员合作,成功开发出一种新型柔软智能传感器,具备高灵敏度、可拉伸等特点,未来可以广泛应用于机器人和假肢领域。
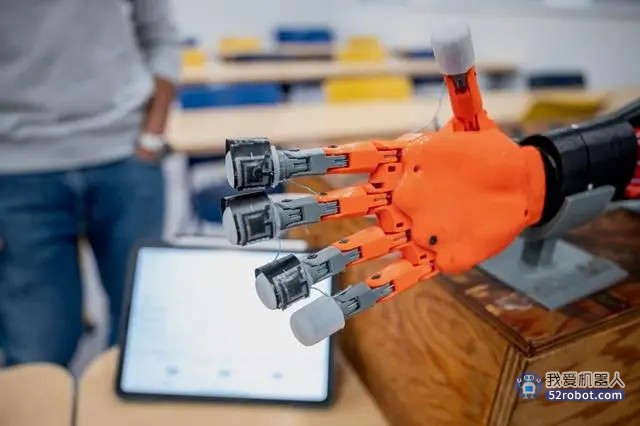
这种传感器在应用于机器人或者假肢之后,能灵敏地感受到物体触摸,从而可以让机器人捡起柔软的物品。

该传感器触感柔软,就像人类的皮肤一样,这有助于使人机互动更安全、更逼真。

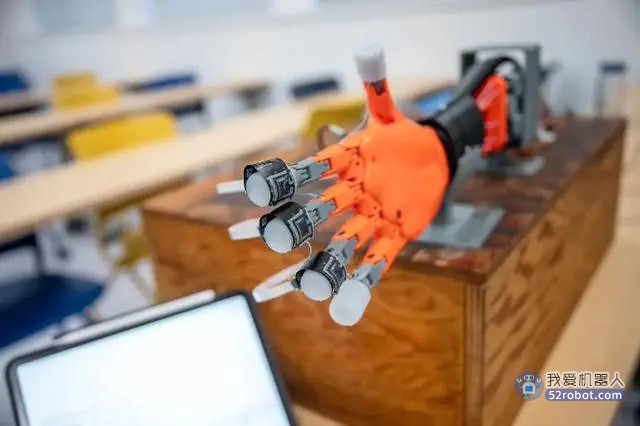
该研究的作者 Mirza Saquib Sarwar 博士表示:“我们的传感器可以感知多种类型的力,让假肢或机械臂能够灵活而精确地响应触觉刺激。例如,手臂可以握住鸡蛋或一杯水等易碎物体,而不会压碎或掉落”。

该传感器主要由硅橡胶组成,这种材料用于制作电影中的许多皮肤特效。该团队的独特设计使其能够像人的皮肤一样弯曲和起皱。

John Madden 博士解释道:“我们的传感器使用弱电场来感知物体,即使是在远处,就像触摸屏一样。但与触摸屏不同的是,这种传感器很柔软,可以检测进入和沿其表面的力。这种独特的组合是采用该技术的关键与人类接触的机器人”
参考论文地址:Mirza S. Sarwar, Ryusuke Ishizaki, Kieran Morton, Claire Preston, Tan Nguyen, Xu Fan, Bertille Dupont, Leanna Hogarth, Takahide Yoshiike, Ruixin Qiu, Yiting Wu, Shahriar Mirabbasi, John D. W. Madden. Touch, press and stroke: a soft capacitive sensor skin. Scientific Reports, 2023; 13 (1) DOI: 10.1038/s41598-023-43714-6
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




















![2023年机器人赛道迎来上市潮,将迎来[黄金十年]!](/static/upload/image/20230216/1676551477185130.jpg "2023年机器人赛道迎来上市潮,将迎来[黄金十年]!")
