MIT:成群的装配机器人显示出制造更大结构的潜力
麻省理工学院的研究人员在创造机器人方面迈出了重要一步,这些机器人几乎可以经济地组装任何东西,包括比它们大得多的东西,从车辆到建筑物再到更大的机器人。
这项来自麻省理工学院比特和原子中心(CBA)的新工作建立在多年的研究基础上,包括最近的研究表明,诸如可变形的飞机机翼和功能性赛车之类的物体可以由微小的相同轻质部件组装 - 并且可以制造机器人设备来执行一些组装工作。现在,该团队已经证明,装配机器人和正在建造的结构的组件都可以由相同的子单元组成,并且机器人可以大量独立移动以快速完成大规模组装。
这项新工作发表在《自然通信工程》杂志上,CBA博士生Amira Abdel-Rahman,教授兼CBA主任Neil Gershenfeld和其他三人的论文中。
Gershenfeld说,一个完全自主的自我复制机器人装配系统既能组装更大的结构,包括更大的机器人,又能规划出最佳的施工顺序,还需要数年时间。但这项新工作朝着这一目标迈出了重要的一步,包括解决何时建造更多机器人以及制造多大的复杂任务,以及如何组织成群不同大小的机器人来有效地构建一个结构而不会相互碰撞。
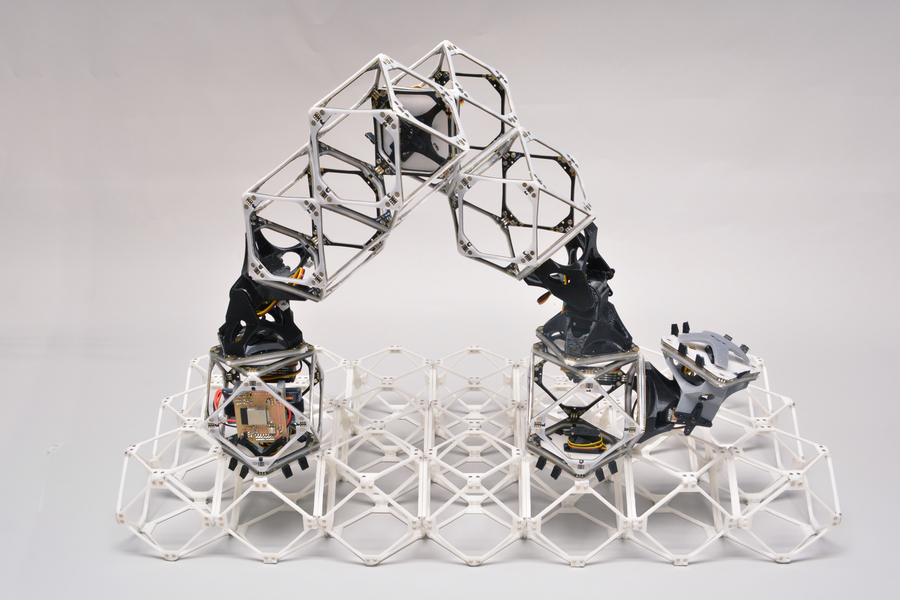
与之前的实验一样,新系统涉及由称为体素(2-D像素的体积等效物)的微小相同子单元阵列构建的大型可用结构。但是,虽然早期的体素是纯粹的机械结构件,但该团队现在已经开发了复杂的体素,每个体素都可以将功率和数据从一个单元传输到下一个单元。这可以使结构能够不仅承受载荷,而且可以进行工作,例如提升,移动和操纵材料 - 包括体素本身。
“当我们建造这些结构时,你必须建立智能,”Gershenfeld说。虽然早期版本的汇编机器人通过一束电线连接到它们的电源和控制系统,但“出现的是结构电子的想法 - 制造传输电力和数据以及力的体素。看着运行中的新系统,他指出,“没有电线。只是结构。
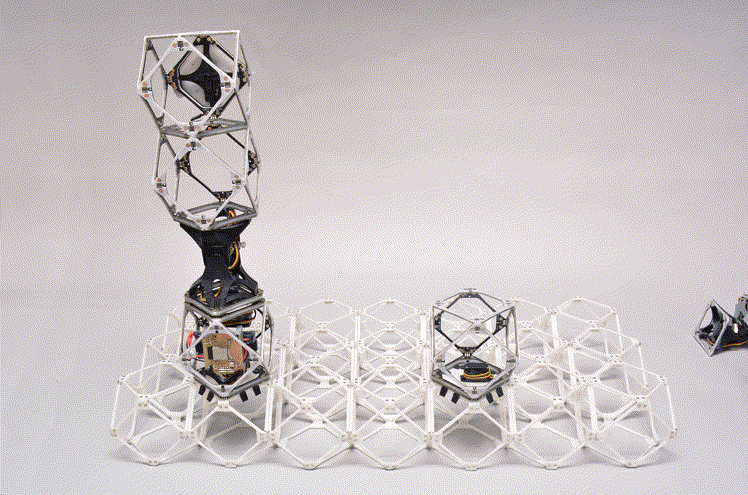
机器人本身由一串端到端连接的几个体素组成。这些可以使用一端的附着点抓住另一个体素,然后像尺蠖一样移动到所需位置,在那里体素可以附着在生长结构上并在那里释放。
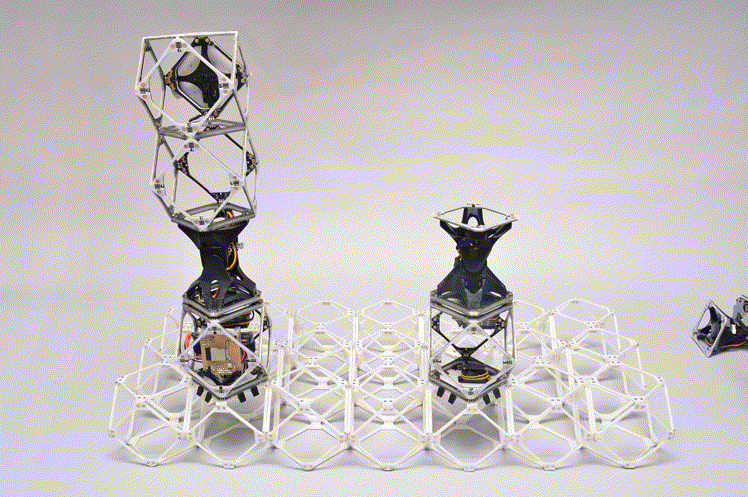
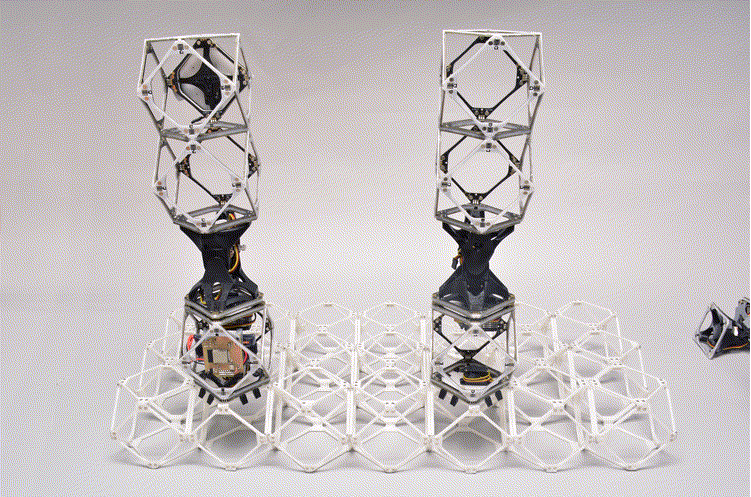
Gershenfeld解释说,虽然他的团队成员展示的早期系统原则上可以构建任意大的结构,但当这些结构的大小相对于装配机器人的大小达到一定程度时,这个过程将变得越来越低效,因为每个机器人必须经过更长的路径才能将每个部件带到目的地。在这一点上,有了新系统,机器人可以决定是时候建立一个更大的版本,可以到达更长的距离并减少旅行时间。一个更大的结构可能需要另一个这样的步骤,新的更大的机器人创造了更大的机器人,而包含许多精细细节的结构部分可能需要更多最小的机器人。
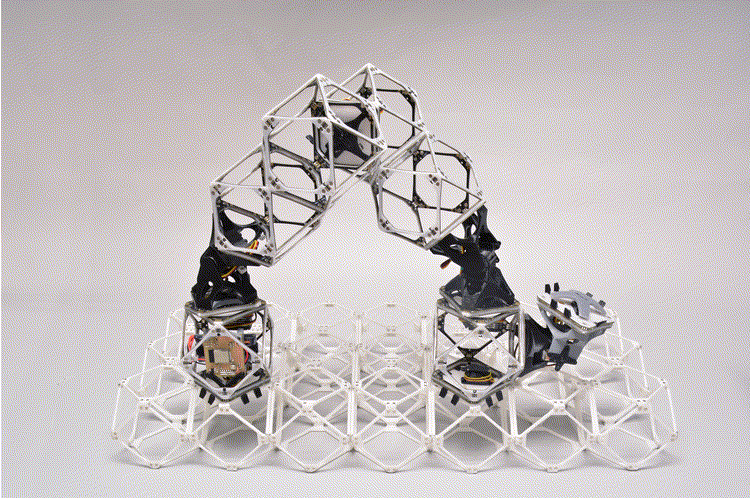
图片来源:Amira Abdel-Rahman/麻省理工学院比特和原子中心
Abdel-Rahman说,当这些机器人设备致力于组装东西时,它们在每一步都面临着选择:“它可以建造一个结构,或者它可以建造另一个相同大小的机器人,或者它可以建造一个更大的机器人。研究人员一直关注的部分工作是为这种决策创建算法。
“例如,如果你想建造一个圆锥体或半球体,”她说,“你如何开始路径规划,以及如何将这个形状”划分为不同机器人可以工作的不同区域?他们开发的软件允许某人输入形状并获得输出,该输出显示根据需要遍历的距离放置第一个块的位置,以及之后的每个块。
有数千篇关于机器人路线规划的论文发表,Gershenfeld说。“但在那之后的步骤,机器人必须决定建造另一个机器人或不同类型的机器人 - 这是新的。在此之前真的没有什么。
虽然实验系统可以进行组装并包括电源和数据链路,但在当前版本中,微小子单元之间的连接器不够坚固,无法承受必要的负载。包括研究生Miana Smith在内的团队现在正专注于开发更强大的连接器。“这些机器人可以走路,可以放置零件,”Gershenfeld说,“但我们几乎 - 但不完全 - 处于其中一个机器人制造另一个机器人并走开的地步。这取决于事物的微调,例如执行器的力和关节的强度。...但已经足够远了,这些是导致它的部分。
最终,这些系统可用于构建各种大型高价值结构。例如,目前飞机的制造方式涉及大型工厂,其龙门架比他们制造的部件大得多,然后“当你制造一架大型喷气式飞机时,你需要大型喷气式飞机来携带大型喷气式飞机的零件来制造它,”Gershenfeld说。像这样的系统是由微型机器人组装的微小部件构建的,“飞机的最终组装是唯一的组装。
同样,在生产一辆新车时,“你可以在第一辆车实际制造之前花一年时间在工具上”,他说。新系统将绕过整个过程。这种潜在的效率是Gershenfeld和他的学生一直与汽车公司,航空公司和NASA密切合作的原因。但即使是技术含量相对较低的建筑行业也可能受益。
虽然人们对3D打印房屋的兴趣日益浓厚,但如今这些房屋需要比正在建造的房屋更大或更大的打印机械。同样,这种结构由成群的微型机器人组装的潜力可以提供好处。国防高级研究计划局也对建造海岸保护免受侵蚀和海平面上升的结构的可能性感兴趣。
休斯顿大学电气和计算机工程副教授亚伦·贝克尔(Aaron Becker)与这项研究无关,他称这篇论文是“一个本垒打——[提供]一个创新的硬件系统,一种思考扩展群体的新方法,以及严格的算法。
Becker补充说:“本文研究了可重构系统的一个关键领域:如何快速扩大机器人劳动力并使用它来有效地将材料组装成所需的结构。...这是我看到的第一件从全新的角度解决这个问题的工作——使用一组原始的机器人部件来构建一套机器人,这些机器人的尺寸经过优化,以尽快构建所需的结构(和其他机器人)。
“建立自我复制系统不仅在科学中是一个经典的挑战,甚至在科幻文学中也是如此 - 到目前为止只有大自然真正实现了,所以这是非常令人兴奋的工作,”德国布伦瑞克工业大学计算机科学系算法学教授Sandor Fekete说,他与这项工作无关。 尽管他过去曾在CBA工作过。
研究小组还包括麻省理工学院-CBA学生本杰明·詹内特和克里斯托弗·卡梅伦,他现在在美国陆军研究实验室工作。这项工作得到了NASA,美国陆军研究实验室和CBA财团资金的支持。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









