22倍身长高度!比硬币小的跳跃机器人会「空中杂技」,以弹尾虫为灵感
昆虫界「空中杂技大师」的秘诀终于被科学家发现了,还成功制作了具有同样能力的机器人!

这位“大师”就是弹尾虫,它是一种没有翅膀的六足动物,之所以被称为“空中杂技大师”,是因为它可以利用身体进行受控地起飞和降落,甚至在半空中调整自己的方向,然后完美地落在同一地点。

具有同样运动机制的还有猫和壁虎,它们也可以在半空中摆正自己,但这是科学家第一次在六足动物身上观察到这一点。

这项研究来自佐治亚理工学院的科研人员,他们不仅打开了弹尾虫能力的潘多拉魔盒,还复制了一个具有同样能力的跳跃机器人,轻至86毫克,身高只有2cm,但跳跃起来高达半米,达22个身长!还能稳稳落地,落地成功率高达75%(弹尾虫的落地成功率为85%)。
▍首次发现弹尾虫的“空中绝技”
弹尾虫生活在水面上,生存环境很不稳定,但它却是地球上数量最多的六足昆虫,这引起了科研人员的好奇——它们是不是具备某种优越的逃脱能力来避开捕食者呢?
带着这种假设,科研人员通过结合计算和机器人物理建模以及流体动力学实验,最终发现了弹尾虫运动的机制:
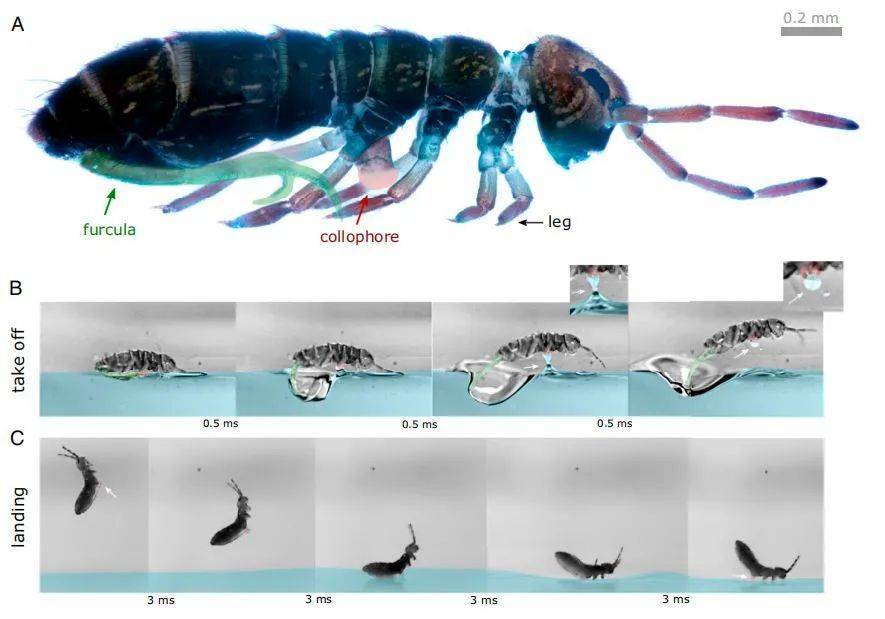
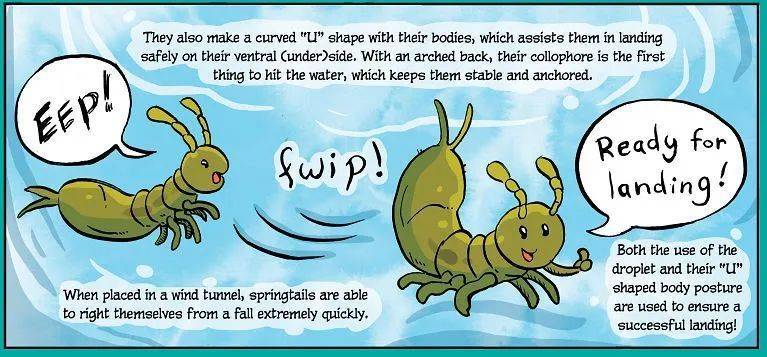
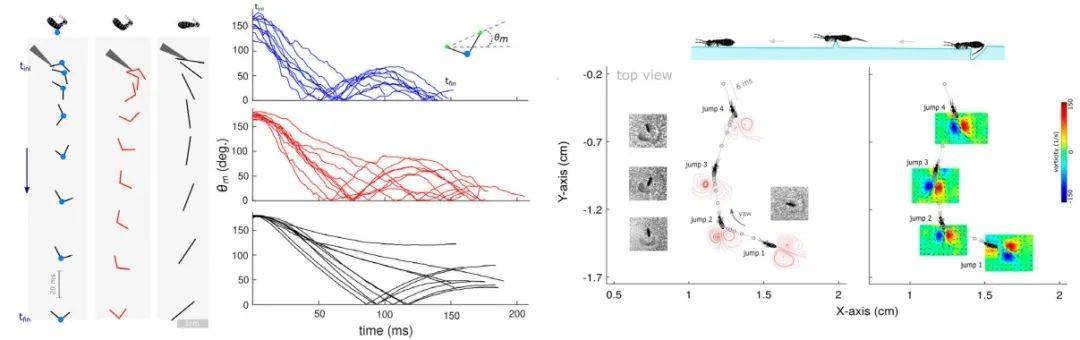
首先,弹尾虫使用特殊的分叉尾巴将自己发射到空中,起飞时就会调整尾巴的角度;在半空中时,身体会调整为弯曲的U型,在跳跃后 20 毫秒内有效地自我扶正,速度是所有无翼生物中最快的。
它们天生长了一种特殊的器官,研究人员将其称为“亲水性胶体”,呈管状结构,可以携带一滴小水珠,帮助在水面上滑行。
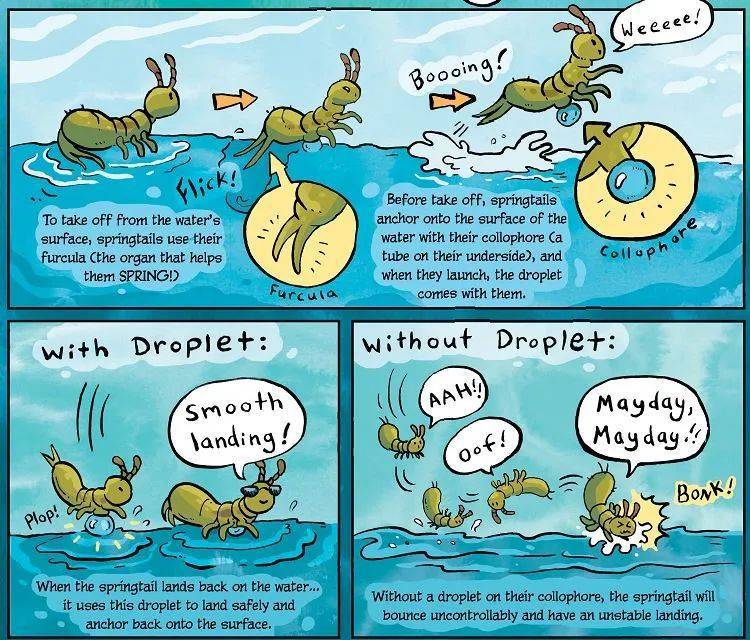
由此一来,当弹尾虫在半空中呈U型弯曲时,会形成一个拱形的背部,背部的“亲水性胶体”将会是最先着陆的,这也帮助它们在坠落中快速恢复,稳定地降落回水面上,并且不会反弹。
▍硬币大小的机器人“飞”起来又高又稳
清楚了弹尾虫的飞行秘诀后,佐治亚理工学院的研究人员与韩国亚洲大学的 Je-sung Koh 教授团队合作,建造了一个小型跳跃机器人,在物理环境中复制了他们的实验和计算观察结果。
“对于跳跃机器人来说,控制它们在空中着陆和跳跃的方向一直是一个重大挑战”论文作者之一Koh 说。“这项研究的发现可能会激发昆虫规模的跳跃机器人的灵感,这些机器人能够安全着陆并扩展机器人在新地形中的能力,例如我们星球湖泊和海洋的开阔水面。”
该机器人设计为具有柔性铰链的折叠机构,采用多层平面材料的智能复合微结构(SCM)加工工艺进行制造,包含一个可弯曲的U型身体、可弹跳的腿、以及SMA 线圈致动器,总重量只有86毫克,身高2cm,还没有一分钱硬币大。
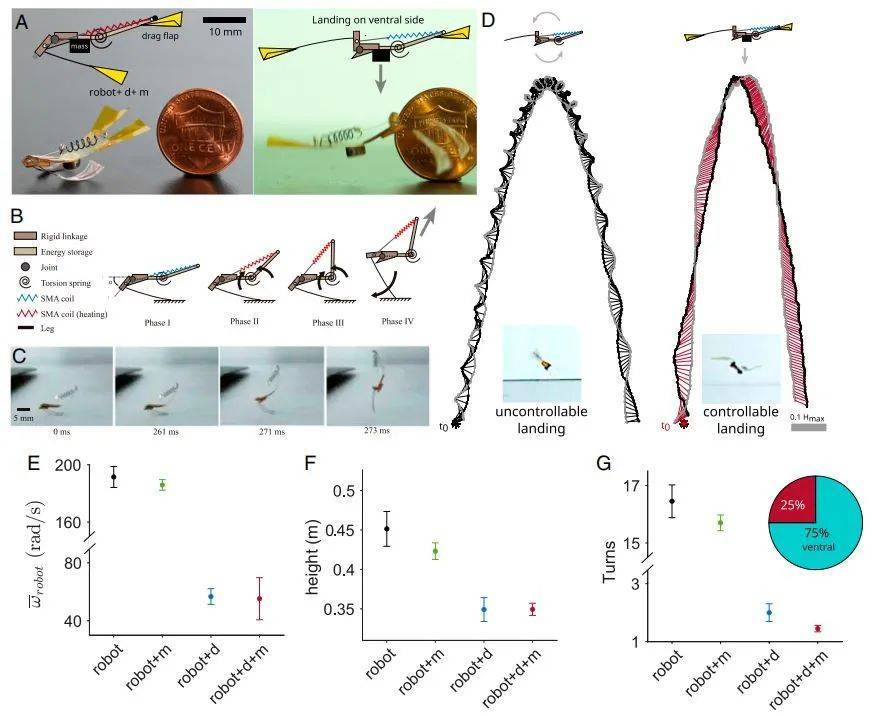
当机器人开始起跳时,SMA 线圈致动器开始加热并收缩,弹性能量通过变形存储在结构中,使腿部向上弹起,最高可达0.45米!约22个身长!
虽然跳得高,但这时机器人的起飞降落并不稳定,研究人员给机器人增加了两个阻力襟翼(聚酰亚胺薄膜),又在其腹部增加了一个额外重量,相当于体重的 14% (~12 mg),用来模拟弹尾虫腹部的胶体结构。
这样一来,变重的腹部可以率先落地,带上“装备”后的机器人明显降低了旋转速度,稳定性大大提高,腹部平稳落地成功率为 75%,相比之下跳虫的成功率为 85%,可以说表现得还是很不错的。
▍打开的生物潘多拉魔盒
该研究发表在《美国国家科学院院刊》上,标题为“Directional Takeoff, Aerial Righting and Adhesion Landing of Semiaquatic Springtails”
论文的第一作者Ortega-Jiménez 说:“我们现在正在打开这个潘多拉魔盒,了解小动物的能力。” “有人认为,因为它们很小,没有大型动物那么多的控制力。于是我们尝试在这种小规模上开启了一些控制的可能性,可以深入了解生物体飞行的起源。”
“这项工作表明受控运动对于捕食者逃脱和生存有多么重要”,美国国家科学基金会项目主任凯瑟琳迪克森说,该基金会为这项研究提供了部分资助。“如果不能控制体操运动员般的逃跑反应,弹尾虫不可能成为数量最多的非昆虫六足动物,这项研究发现了它们如何控制跳跃、在半空中旋转和安全着陆的生物力学,这可以更好的促进机器人学及空气动力学等领域的进一步发展。”
DOI: https://doi.org/10.1073/pnas.221128311
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















