工序衔接更紧凑,未来机器人助力知名装备制造工厂物流高效运转
工厂物料种类繁杂,工序流程多,经常会出现工序转运过程中物料到达不准时,物料调动混乱,托盘和零部件配套混乱等现象,导致整个工序内部物料转运消耗的时间成本上升,出现有的工序“空闲”,而有的却很“繁忙”的景象。此时整合工厂内部物流流程,使得不同工序之间衔接更紧凑,减少物料等待时间就变得极为重要。
项目背景
客户位于西南地区,是国内装备制造行业龙头企业,工厂车间物料种类繁多,涉及多个区间转运,无人叉车叉取转运的载具型号在4种以上。客户希望导入未来机器人高柔性内部物流自动化解决方案,通过配置顶层系统和终端设备,让物料点到点转运,工序衔接更紧凑,实现仓储管理智能化,提升物流转运效率。
客户需求
匹配多种载具型号
客户项目现场物料种类繁多,对应不同型号载具。这对无人叉车来说,不仅需要识别载具的大小尺寸,而且还要自适应调整货叉,才能精准匹配不同型号载具。




衔接工序区间物料转运
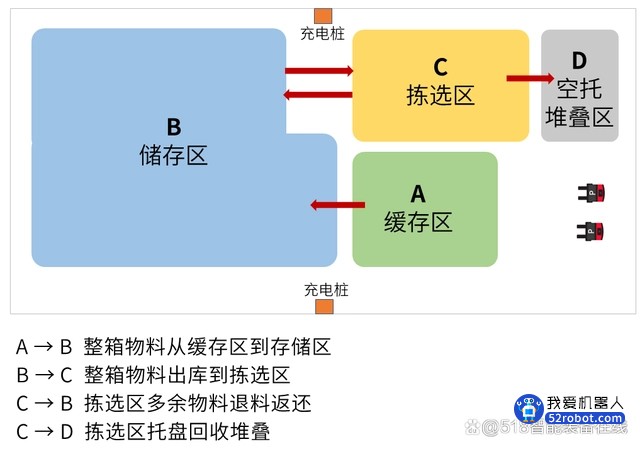
该项目流程主要覆盖整箱物料从缓存区到存储区的入库,存储区和拣选区之间物料转运,以及拣选区托盘回收流程。在物料出入库转运过程中,仓储管理系统需要同步打通库位信息与托盘载具信息,对接无人叉车设备,及时响应需求,确保物料在工序间转运顺畅。

方案流程
基于往期在机械制造行业积累的深厚经验,未来机器人在考察完客户现场后,输出高柔性物流自动化解决方案,梳理客户工厂内部物流流程,通过配置2台VNP20平衡重堆高式无人叉车作为终端应用设备,再搭配中控调度系统对接客户WMS,优化无人叉车作业路径,实现物料在区间转运时“不等待”、“不拥堵”,高效运转。
入库流程:未来机器人中控调度系统与客户WMS系统对接,当物料进入缓存区,员工通过扫描托盘物料编码,绑定入库库位编码,再通过中控调度系统下发任务给VNP20无人叉车。VNP20无人叉车前往执行物料入库作业,将货物搬运到指定库位,完成入库流程。
转运流程:客户WMS将拣选区包含物料类型、库位信息、拣货数量等信息清单发送给中控调度系统,再由员工选择拣货单任务,中控调度系统自动匹配该任务,并将该任务中所需的物料信息发送给VNP20无人叉车,调度对应车辆前往执行物料转运作业。

项目价值
降低运维成本:在不改变客户仓库载具配置及流程情况下,未来机器人配置VNP20平衡重无人叉车实现缓存区-存储区-拣选区之间物料自动转运,节约1~3倍人力成本;面对不同型号载具,VNP20搭载自适应感知激光,精准识别不同型号规格载具并调节货叉叉距,根据托盘位姿调整车身位姿,精准叉取,实现高精度。

提升转运效率:双台无人叉车高效转运的关键在于系统的路径规划及调度能力。就像接力赛一样能够及时对接需求。同时还要求VNP20无人叉车具备极高的稳定性,在衔接不同工序执行物料转运作业时,不会出现故障停顿、加速减速、或存放货失败的情况,持续稳定作业,确保物料转运尽然有序,从而减少物料“空闲”时间,提升整体转运效率30%。
随着智能制造逐步深入推进,未来机器人内部物流解决方案能将整个制造工厂之间的流程工序有效衔接,物料在生产工序间的自动化转运更顺畅,助力工厂制造物流高效运转。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















