瞬间进化:人工智能在几秒钟内从零开始设计新机器人

研究人员在橡胶机器人身体中注入空气,使其三条腿膨胀。当机器人身体内的空气瘪下去时,三条腿就会收缩。通过不断向机器人体内注入空气,它就会反复膨胀然后收缩,从而产生缓慢而稳定的运动。
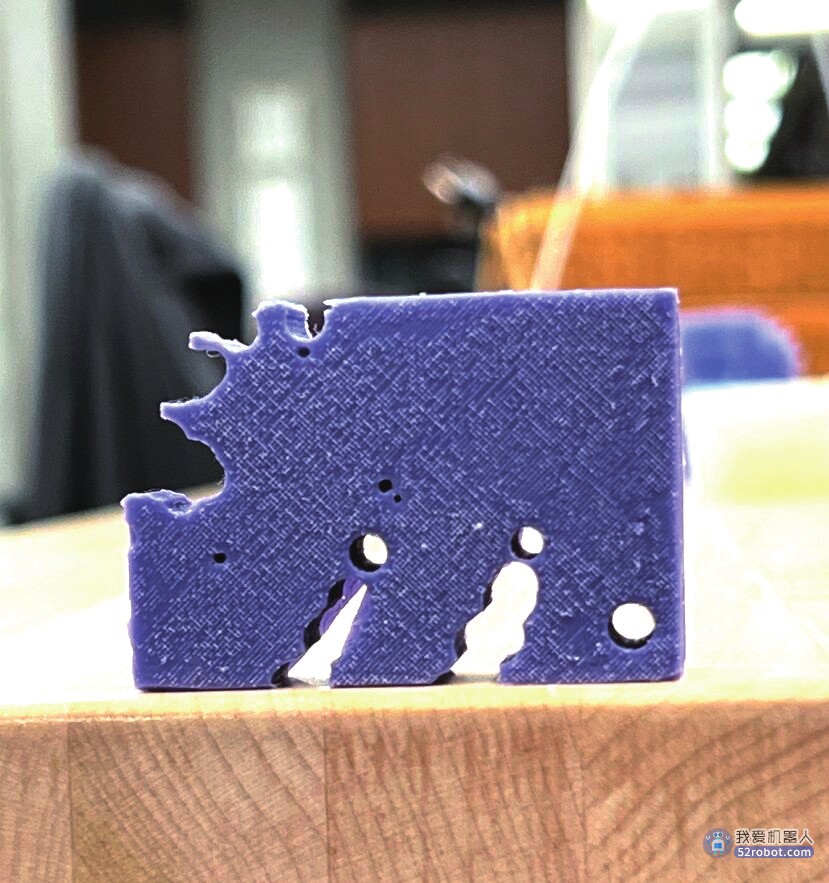

人工智能在机器人全身看似随意的地方打孔。克里格曼假设,孔隙可以减轻重量,增加灵活性,使机器人能够弯曲腿部行走。
由美国西北大学研究人员领导的一个团队,开发出了迄今为止第一个能够从头开始设计机器人的人工智能(AI)。
为了测试新的人工智能,研究人员给了系统一个简单的提示:设计一个可以在平面上行走的机器人。大自然花了数十亿年才进化出第一个会行走的物种,而新算法却以闪电般的速度压缩了进化过程——只用了几秒钟就设计出了一个成功行走的机器人。
该人工智能程序不仅速度快,它还能在轻便的个人电脑上运行,并从零开始设计全新的结构。这与其他人工智能系统形成了鲜明对比,后者通常需要高能耗的超级计算机和庞大的数据集。即使在计算了所有数据之后,这些系统仍然受到人类创造力的限制——只能模仿人类过去的作品,而无法产生新的想法。
这项研究于10月3日发表在《美国国家科学院院刊》上。
“我们发现了一种非常快速的人工智能驱动设计算法,它可以绕过进化过程中的‘堵点’,而不会受制于人类设计师的偏见。”领导这项工作的美国西北大学萨姆·克里格曼(Sam Kriegman)说,“我们告诉人工智能,我们想要一个能在陆地上行走的机器人。然后,只需按下一个按钮,就可以了!它在眨眼之间就生成了一个机器人的蓝图,这个机器人看起来与地球上曾经行走过的任何动物都毫无二致。我把这个过程称为‘瞬间进化’。”
克里格曼是美国西北大学麦考密克工程与应用科学学院计算机科学、机械工程和化学与生物工程专业的助理教授,也是该学院机器人与生物系统中心的成员。克里格曼实验室的科学家戴维·马修斯(David Matthews)是这篇论文的第一作者。克里格曼和马修斯与共同作者安德鲁·斯皮尔伯格(Andrew Spielberg)、丹妮拉·鲁斯(Daniela Rus)(麻省理工学院)和乔什·邦加德(Josh Bongard)(佛蒙特大学)密切合作数年,才有了这一突破性发现。
从异种机器人到新生物
2020年初,克雷格曼因开发出异种机器人(第一种完全由生物细胞制成的活体机器人)从而引起了媒体的广泛关注。现在,克里格曼和他的团队将他们的新型人工智能视为探索人工生命潜力的下一个进展。机器人本身并不起眼——小巧、柔软、形状不规则。目前,它还是由无机材料制成的。但克里格曼说,它代表了人工智能设计工具新时代的第一步,这些工具就像动物一样,可以直接作用于世界。
“当人们看到这个机器人时,他们可能会认为这是一个无用的小玩意,”克里格曼说,“而我看到的是一个全新有机体的诞生”。
从零到行走只需几秒钟
虽然人工智能程序可以从任何提示开始,但克里格曼和他的团队从一个简单的要求开始,即设计一个能够在陆地上行走的物理机器。研究人员的输入到此结束,人工智能接管了工作。
计算机生成肥皂大小的块状结构并开始设计。它可以晃动,但绝对不能行走。人工智能知道自己还没有达到目标,于是迅速对设计进行了反复修改。每一次迭代,人工智能都会对设计进行评估,找出缺陷,并对模拟块进行切削打磨,更新其结构。最终,模拟机器人可以在原地弹跳,接着向前跳动,然后变换位置。最后,只经过9次尝试,它就生成了一个每秒能走半个身长的机器人——大约是人类平均步速的一半。
整个设计过程——从零运动的无形块到完全行走的机器人——在笔记本电脑上只用了26秒。
克里格曼说:“现在,所有人都可以看到人工智能实时生成越来越好的机器人时的进化过程。以前,机器人的进化需要在超级计算机上进行数周的反复试验,当然,在任何动物能够在世界上奔跑、游泳或飞行之前,也需要数十亿年的反复试验。这是因为进化论没有远见。它无法预见未来,无法知道特定的突变是有益的还是灾难性的。我们找到了揭开这一障眼法的方法,从而将数十亿年的进化过程压缩到一瞬间。”
重新发现双腿
人工智能竟然自己想出了与大自然相同的行走解决方案:腿。但与自然界绝对对称的设计不同,人工智能采用了另一种方法。这个机器人有三条腿,背部有鳍,脸是平的,身上布满了孔。
克里格曼说:“这很有趣,因为我们并没有告诉人工智能机器人应该有腿。它重新发现了腿是在陆地上移动的好方法。事实上,腿部运动是陆地上最有效的运动方式。”
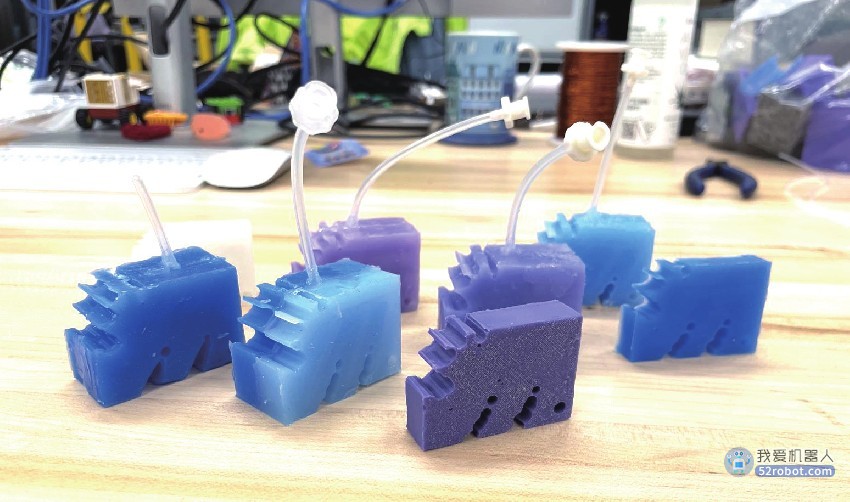
为了了解模拟机器人能否在现实生活中工作,克里格曼和他的团队以人工智能设计的机器人为蓝本。首先,他们用3D打印出机器人身体周围负空间的模型。然后,他们在模具中注入液态硅橡胶,并让其固化几个小时。当团队将凝固的硅胶从模具中取出时,它变得柔软而有弹性。
现在,是时候看看机器人的模拟行为——行走——是否能在物理世界中保留下来了。研究人员在橡胶机器人身体中注入空气,使其三条腿膨胀。当机器人身体内的空气瘪下去时,三条腿就会收缩。通过不断向机器人体内注入空气,它就会反复膨胀然后收缩,从而产生缓慢而稳定的运动。
陌生的设计
虽然腿部的进化是合情合理的,但孔洞的加入却令人感到奇怪。人工智能在机器人全身看似随意的地方打孔。克里格曼假设,孔隙可以减轻重量,增加灵活性,使机器人能够弯曲腿部行走。
他说:“我们并不真正了解这些孔的作用,但我们知道它们很重要。因为当我们把它们拿走时,机器人要么不能再行走,要么就不能走得很好。”
总的来说,克里格曼对机器人的设计感到惊讶和着迷,他指出,大多数人类设计的机器人要么像人、要么像狗,要么像冰球。
“当人类设计机器人时,我们倾向于把它们设计成熟悉的物体的样子,”克里格曼说,“但人工智能可以创造人类从未考虑过的新的可能性和新的前进道路。它可以帮助我们以不同的方式思考和梦想。这可能会帮助我们解决我们面临的一些最棘手的问题。”
未来的潜在应用
虽然人工智能的第一个机器人只能做变换位置前进的动作,但克里格曼想象了由相同程序设计的工具的无限可能。有朝一日,类似的机器人也许能在倒塌的建筑物废墟中穿梭,根据热和振动信号搜寻被困的人和动物,或者穿越下水道系统诊断问题、疏通管道和修复损坏。人工智能还可能设计出进入人体的纳米机器人,通过血液循环疏通动脉、诊断疾病或杀死癌细胞。
克里格曼说:“阻碍我们使用这些新工具和疗法的唯一原因,是我们不知道如何设计它们。幸运的是,人工智能有自己的想法。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















