开源移动机器人集群编队控制系统,助力科研教学!
深圳人才公园经常可以看到上千架无人机齐刷刷地腾空而起,在空中随着动感音乐翩翩起舞,其队形之整齐,变化之多,画面之美,吸引了许多人驻足欣赏,大家纷纷点赞这由科技领衔出演的动态画展。

在大洋彼岸的波士顿动力公司每发布一次视频,都让全球众多粉丝为之赞叹,赞叹机器狗生动活泼的舞姿,丰富的动作,以及人形机器人令人惊叹的运动能力和超强的动态平衡能力。

无论是遨游天际的无人机,还是地面撒欢的机器狗,亦或是大秀舞技的人形机器人,它们各有各的能耐,各显各的神通,但有一点是相同的:它们都能整齐划一的完成指定动作,也能彼此合作排出各式各样的队形,这其中有什么奥秘吗?有,它就是:集群编队协同控制!

集群和编队其实是两个概念,简单来说集群就是几个或多个智能体协调一致的运动,而编队是指几个或多个智能体保持特定的队形移动。我猜测最先提出的集群编队概念的人可能是看了《动物世界》后受到了启发:动物们每到迁徙之时, 便会以集群之势,一同奔赴某个目的地,在这个过程中,它们既能保持队形,又能在或快或慢的行进中与四周围的邻居保持安全距离,这实在是妙!

当然由动物迁徙启发之说只是猜想,在上个世纪60年代美国就有学者以直升飞机为研究对象,研究在飞行过程中,直升飞机如何保持队形,由此慢慢形成了编队控制的理论和方法。实际上,在集群编队控制中目前的研究热点主要集中在编队的控制策略、编队过程中的队形保持以及变换的控制和优化问题。
目前众多的高校和科研机构研究多智能体集群编队协同控制都采用了无人机,研究成果丰富,但以UGV(地面无人移动机器人)为载体的研究在近些年也备受青睐。不过高校和科研院所在开展机器人相关研究时往往会面临一些困难,比如硬件平台的设计、搭建工作量大、周期长,费时费力,而很多单位也缺乏系统性的平台搭建资源;获取相关源码渠道少、难度大,学习掌握和二次开发难度较大等。
基于此,深圳史河机器人推出多源融合室外移动机器人集群编队协同控制技术方案,旨在为广大UGV集群编队协同控制的科研工作者提供一个“拎包入住”型的方案,协助他们解决这些痛点,从而可以更快地向前推动项目。
笔者第一次看到这个方案的时候其实有个疑问:以无人机为载体的集群编队控制技术研究是主流方向,其科研成果也在很多方面得到了应用,为什么现在反而很多科研人员转向以UGV为载体了呢?本文认为主要有以下两点:
从技术层面看,智能移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。
深圳史河移动机器人产品MR600
从应用层面看,多移动机器人集群编队协同系统经过多年的发展历程后,在军事、国防、工业、生活等领域都有广泛的应用空间。例如,其在智慧仓储物流、编队巡逻、灾难救援、环境探索等具体应用场景中均显示出了极大的优势,所以,对多移动机器人编队协同技术进行研究和应用,具有重要意义。
那么,什么是多源融合呢?
这里的多源其实是定位的多源:基于RTK-GPS+UWB多源融合定位。
多源融合有什么特点?
我们知道,集群编队研究的核心问题包括编队控制策略、队形变换策略,简单来说就是要达到在控制多个智能体在保持队形、完成变换队形任务的过程中要像迁徙的动物们一样,既能迅速,又能稳定,还要安全(单个智能体相对它的邻居而言)。要达到这个目的,最重要的因素有两个:每个智能体的位置信息、智能体之间的通信。以史河机器人的方案为例,他们推出的方案采用改进UKF融合算法,通过对车轮里程计、SLAM定位、惯导、UWB定位、RTK-GPS定位多源融合,定位精度与平滑度更优,可以有效补偿单一定位方法的系统误差。此外,在经过特殊区域时,系统可以根据定位信息置信度灵活切换定位方法,避免GPS或UWB定位信息丢失造成定位误差骤增,从而进一步提高系统鲁棒性。
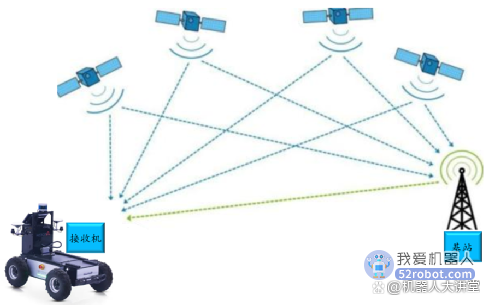
RTK-GPS定位系统示意图
在通信上,该方案采用基于UDP协议的局域网多机通信架构。多台机器人接入同一局域网内,每台机器人被分配唯一标识端口号。机器人个体针对自身端口发起信息广播,信息中包括位置、控制参数等。其他机器人个体均可通过监听指定端口捕获任意机器人所广播的信息。基于局域网的多机通信方式受网络带宽、数据吞吐量、传输距离等影响,尤其是需要实时视频数据传输时。对于户外远距离工作的场景,可以采用大功率数传、图传电台或4G DTU代替局域网。

分布式通信架构示意图
刚刚谈到了编队控制策略是集群编队的核心研究课题之一,全球范围内研究多智能集群编队的控制策略主要由哪些呢?主要有以下几种:Leader-Following(领航者跟随法)、Behavior based(基于行为法)、Virtual structure(虚拟结构法)、Artificial(人工势场法)。深圳史河本次推出的方案则把领航者跟随法和基于行为分析法结合起来,因此也具备了Leader-Following(领航者跟随法)控制简单,易于实现以及Artificial(人工势场法)高效、鲁棒性强的优势。
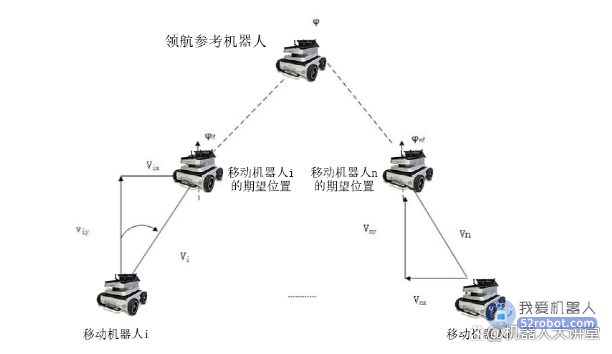
基于领航参照的移动机器人运动模型
该方案的最大优势其实在于“软硬实力兼具”。该方案提供获得上百家高校认可的移动机器人,提供Ubuntu环境下基于ROS系统的SDK开发包,支持python及C++语言,包含UWB位置信息、飞行时间、时间戳及机器人编队控制方法源码,支持二次开发,可实现多台移动机器人的三角编队、横队、纵队及斜队队形的队形生成、编队保持、集群内部避碰的队形切换、编队绕障碍物功能。此外,方案提供自定义队形,用户可根据使用需要定义移动机器人数量及队形。提供操作UI界面,可根据用户需求定制界面。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









