骨科手术机器人技术和产业发展现状、机遇和挑战
01
手术机器人技术和产业发展现状
1.1手术机器人技术发展现状
从二十世纪末叶到本世纪初,从西方海洋文明到东方陆地文明,全球手术机器人技术历经数十年横跨地域、时空,开启了将全人类带入机器人治疗的微创时代。
从手术机器人技术发展路径来看,国外和国内技术发展周期并不同步,国外暂时走在国内的前面。国外从1992年第一台获得FDA批准的ROBDOC医疗手术机器人开始,到后来名冠全球的Davinci(达芬奇)手术机器人,以及Zeus(宙斯)系统、Mazor Renaissance、MAKO机器人等。国内第一台获得批准用于临床的手术机器人是1997年的CRAS(Computer and Robot Assisted Surgery)机器人,其用于立体定向颅咽管癌的放射治疗,从此中国也开始了自己的手术机器人发展历程。
另外从手术机器人技术发展周期来看,国外大致经历尝试期(1992年-2000年),发展期(2000-2010年),创新期(2010-2021年)和爆发期(2021-至今)。国内发展周期也基本类似,但是稍微滞后十年左右时间,目前国内尚处于创新期,国产手术机器人的爆发期何时到来,我们对此充满期待。(请见图1)
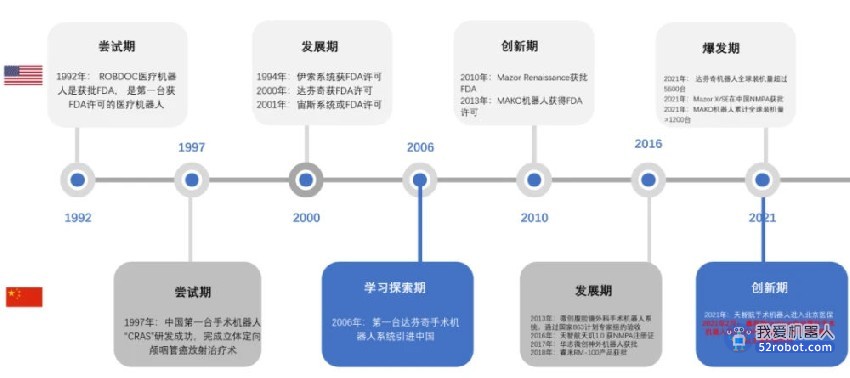
图1:手术机器人国际与国内发展历程
1.2手术机器人产业发展现状
目前,从全球手术机器人产业来看,主要分布在以下五个赛道(请参见图2):
1.腹腔镜手术机器人:国外以直觉外科Intuitive Surgical的达芬奇(Da Vinci)手术机器人为代表,拥有三维高清视野,头发丝大小的血管在医生眼里也能清晰可见,可转腕的关节,比人手更加的小巧灵活,同时医生的手部动作可以准确地重现在患者体内的器械上,是腹腔镜手术机器人的天花板。国内腹腔镜手术机器人以上海微创Microport的图迈(Toumai)手术机器人,以及深圳精锋(多孔手术机器人)为代表。
2.骨科手术机器人:目前主要涵盖了脊柱、关节(髋膝)、创伤等骨科手术机器人,国外以美敦力Mazor X/SE脊柱手术机器人为典型代表,占据了全球骨科手术市场的主要份额;国内以天智航“天玑”脊柱手术机器人为代表,其技术路线与捷迈邦美的Rosa Spine手术机器人基本一致,都是属于“机器人导航+医生徒手操作”的路线。国内脊柱手术机器人的后起之秀以鑫君特ORTHBOT®为代表,开创了新的技术路线,即“机器人导航+机器人自动执行手术操作”,解决了医生徒手操作不稳,不准,医生疲劳等痛点,真正实现了“不止是导航,而是真正的参与手术操作”。
3.经皮穿刺手术机器人:其本质仍然是医学影像引导下的定位和光学追踪或者电磁信号追踪下的手持导航。经皮穿刺手术机器人海内外的典型代表有Veran(ig4 imaged),EDDA(iQQA-Guide)以及上海精励医疗穿刺机器人。
4.泛血管介入手术机器人:它是从微导管/导丝的手工操作系统发展而来,加入了操作手等精密控制的部件。属于主从控制类的机器人系统。其国内外典型代表有Siemens(Corindus-corpath),Robocath(R-one)上海奥朋医疗介入机器人。
5.经自然腔道手术机器人:它是之前软性内窥镜和镜下操作器械的数字化和精准化的产物。使用柔性机械臂,经自然腔道进入人体腹腔进行诊断和治疗程序,海外代表性产品有:Intuitive Surgical(Bronchoscopic robot),Johnson&Johnson (Bronchoscopic robot)。
其中,骨科及神外手术机器人又分为:脊柱机器人、关节机器人、创伤机器人、以及运动医学机器人。

图2-全球主要手术机器人产业类型(图片分类来源于网络)
手术机器人技术起源于工业机器人,最早应用于软组织穿刺(1985年),后来运用于腹腔镜手术(1994年),目前几乎可以运用于任何人体组织,经过数十年的探索和发展,目前以达芬奇为代表的腹腔镜手术机器人,仍是手术机器人产业中“最靓的仔”。
技术在进步,产业在发展,科技工作站和医疗人员在不停的探索手术机器人可能的适应证,各方都在寻找下一个“达芬奇”可能出现的领域。从近二十年发展来看,人们很快并较为全面的找到手术机器人下一个应用场景——骨科,典型的如脊柱内固定,膝髋关节置换等。相对于基于主从控制的腹腔镜手术机器人,应用于硬组织的骨科机器人的关键技术又有哪些呢?下面将以脊柱内固定相关的脊柱手术机器人为例,抛砖引玉。
02
脊柱手术机器人技术路线和关键技术
2.1脊柱手术机器人主要技术路线
国内外主要脊柱手术机器人辅助手术,主要使用的设备包含术前CT扫描仪、C-臂透视机、医生工作站和脊柱手术机器人(请见图3)。
图3-国内外主要脊柱手术机器人辅助手术所用设备
从工作流程来看,脊柱手术机器人主要技术路线基本可以分为两种:一种是术前规划(基于术前CT)+术中二维影像;另一种是术中规划(直接基于术中三维影像)。
针对第一种情形,需要用到二维C-臂透视机、医生工作站、导航定位和脊柱手术机器人等设备。大致流程是:术前进行CT扫描,获得患者手术区域的三维影像,然后进行分割、三维重建,获得虚拟的3D椎体,对3D椎体图像进行分割。医生在术前可以在三维椎体图像上进行手术规划,完成术前手术规划;在术中使用C臂对患者椎体进行二维透视,获得二维影像,通过图形配准算法将术中二维透视图与术前的CT三维图像进行匹配,一般需要从不同角度完成两张二维X光片对三维CT图像的配准,从而达到术前手术规划与患者手术位置的精确配准,之后通过导航实时跟踪、机械臂自动定位和执行手术操作(医生徒手或机器人自动执行手术操作),完成手术。
而另外一种技术路线则不依赖术前的CT扫描,它是在术中通过三维C臂或者O型臂扫描患者手术区域,完成机械臂和患者手术位置以及导航设备空间坐标系的配准,之后进行术中的手术规划,通过导航引导执行机械臂辅助定位、医生根据定位和方向执行手术操作,通过导航系统验证植入物位置,从而完成手术操作。
2.2脊柱手术机器人主要关键技术和难点
从上述两种工作流程可以看出,脊柱手术机器人的关键技术主要在以下四个方面:
(1)术前/术中规划:主要技术涉及植入物建模,影像三维重建与识别,多模态融合,定位参考系等。多模态影像融合、三维重建与识别对各家手术机器人产品提出了较大的兼容性挑战。定位技术主要有红外,以及可见光和磁导航,其中加拿大NDI公司一家独大,市占率95%左右,国内公司也在尝试其他导航技术路线,比如鑫君特公司开发的基于可见光的双目导航技术已经成功用于其已注册产品ORTHBOT®。也有国内企业在红外导航领域开发自研产品,比如广州艾目易和北京艾瑞麦迪等。从产品稳定性,技术领先性等都还有待市场验证。如何实现导航定位技术的国产替代,解决卡脖子问题,依然是国内行业面临的课题。
(2)图像分割与配准:主要技术包含CT与X光图像分割,定位标记板设计,DRRX配准算法等。除此之外,图像配准算法还有点云配准、结构光等。其中,DRRXS配准算法的图像计算量很大,配准时间较长,医生需要在手术室长时间等待,影响工作效率。如何提升计算效率、算力或寻求新的技术解决当前配准算法的问题,依然任重道远。
(3)机械臂定位与控制:技术上主要包含多设备间的坐标系转换,安全边界保护,运动路径规划,绝对定位与重复定位精度提升,力反馈传感技术等。机械臂的主要部件包含伺服电机、谐波减速机、传感器和力控制器等。除了少部分手术机器人公司采用自研机械臂,大部分公司都采用外协通用的工业机械臂。
通用机械臂的局限在于底层技术依赖、进口价格高、有断供风险、基本不接受定制开发且售后不便等。进入2020年之后,虽然也有很多国产工业机械臂产品问世但伺服电机、谐波减速机占据了较大成本空间且严重依赖进口。市场主流的机械臂品牌(UR、KUKA,节卡、思灵、珞石、Staubli)可选择空间较小。而手术机器人公司自研机械臂将会面临更加高昂的研发摊销并且无法形成量产规模。进一步推高单个机械臂的平均可取得成本。这些都严重制约着医用机械臂和手术机器人的发展。
(4)导航与追踪:主要技术包含导航参考架设计,工具建模,特征点注册算法,可视化融合,刷新频率策略,运动跟踪感知与控制等。骨科手术机器人导航追踪技术主要采用红外线和可见光技术,还有少量磁导航技术。由于骨科手术现场会用到大量的金属工具,会干扰磁场信号,因此骨科很少使用磁导航技术。市场主流的红外导航品牌有NDI(加拿大)、Atracsys(瑞士)、PST(荷兰)、国产的有艾目易(中国广州)、艾瑞迈迪(中国北京)等。鑫君特Orthbot®机器人采用的是自研可见光导航技术——双目视觉系统,具有自主知识产权,自主导航定位追踪,空间定位功能,手术部位监控功能和远程监控功能(请参见图4)。
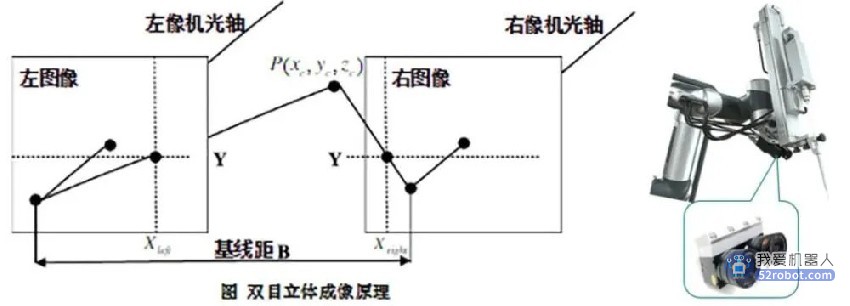
图4-鑫君特ORTHBOT®双目视觉导航系统(左侧原理图出处见参考文献)
红外线技术主要通过红外线追踪定位在患者身上的参考架上的无源反射球来追踪手术工具和患者的骨性结构,不同的参考架一般采用不规则四边形进行区分,参考架需与患者保持相对静止来保证患者位置的准确性,且红外线容易受到遮挡等影响,从而影响跟踪准确性,及时性。
脊柱手术机器人辅助技术经历了从最开始的①‘示踪器结合手工操作’到②‘手工牵引机械臂工作’到③‘机械臂带指向器配合手工操作’再到④‘机械臂带动工具结合机械臂导航、运动平台操作’。未来随着人工智能、人机交互技术及5G通讯的进步,手术机器人有望扩展到更多的外科专业并实现更高的手术精准度、灵敏度及智能远程控制(请参见图5)。

图5-脊柱手术机器人技术演进树
03
机器人在骨科手术运用中的机遇
从2015年到今天,国务院、发改委、工信部等多个部门发布或联合发布了多个医疗器械相关的政策,旨在促进和支持医疗机器人技术、应用和产业的发展。如2021年12月28日,工信部等十部门联合印发《“十四五”医疗装备产业发展规划》提出:攻关智能手术机器人,加快突破快速图像配准、高精度定位、智能人机交互、多自由度精准控制等关键技术。手术机器人应用的最大特点是安全、准确、微创。机器人手术疗法的可复制性、可预见性,能够控制手术风险降低医疗事故,病人可获得更好的疗效和更快的术后康复时间。随着人工智能和机器学习技术的发展,机器人手术系统能够更好地适应不同的手术和患者需求,并在手术中做出更精确的决策。(请见图6)
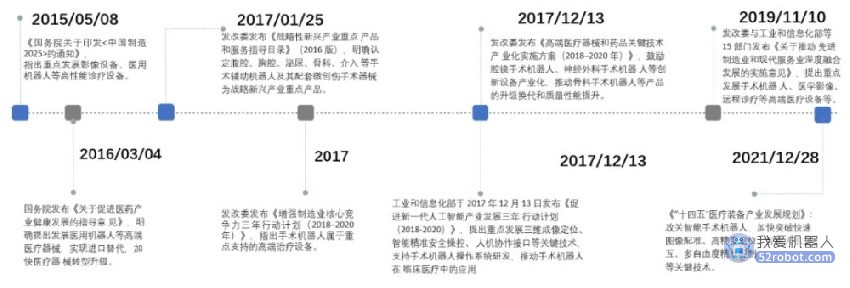

图6-医疗机器人相关国家政策
骨科手术机器人使用数字化技术以及计算机辅助可以保证更加精准地执行手术。在临床上给病人带来了稳定的疗效和较少的创口,缩短康复时间。医生也可以减轻疲劳,减少术中射线暴露的计量。确保手术效果的稳定性和一致性。病人和医生都能获益。

表1:手术机器人与传统微创手术对比图
在这样的临床良好预期下以及国外手术机器人的先验经验的影响下,从2015年开始到2020年,国内出现了对手术机器人产品和创新Startup公司的资本追逐浪潮,涌现出一大批创新企业专注于手术机器人的研发领域,遍布各个细分赛道。从地域上看,北京、上海以及长三角、深圳仍是手术机器人的产业集群集中地,也不乏一些新兴企业布局在武汉、重庆、成都、合肥等中部地区。而且不局限于经典的五大赛道,还有一些公司专注于神外、消化道介入、牙科植入、植发等领域。资本的持续投入给中国手术机器人领域的崛起创造了良好的开始,同时也带来了过高的预期和紧迫的时间压力。

图7-国内手术机器人公司地域分布(不完全统计)
在国家和地方政策的促进和支持下,手术机器人技术发展和应用得到了长足进步,尽管如此,也面临一些挑战。
04
机器人在骨科手术运用中的挑战
骨科手术机器人的应用和推广主要面临以下挑战:
挑战一:技术限制。
手术场景单一:一台机器人适用特定适应证,拓展适应证需要重新临床和注册,注册周期和研发以及前期投入都很大;手术设备种类繁多,操作复杂,术中医生之间、跟台人员之间的相互交互频繁;数据安全和隐私保护限制了机器人厂商对医学数据的利用,目前医院的数据都不能直接用于产品研发,都是数据孤岛,难以实现信息共享,不利于机器人技术迭代升级。
挑战二:成本高昂。
涉及研发、测试、验证、临床、注册、制造、销售推广,售后服务等成本。比这些更重要的是时间成本:一个手术机器人项目的研发,从立项到上市的完整时间周期少则需要4~5年,多则时间更长。
挑战三:医保政策。
国家医保政策总体是控费,各地陆续出台针对手术机器人收费的设限。如单纯的机器人导航,耗材不能单独收费,植入物走带量采购等。再加上医院采购还可能需要配置证,进口论证,这些都在限制手术机器人的临床推广。
挑战四:商业化进程。
达芬奇的“剃须刀”模式,主要由设备、耗材和服务组成,此模式基本成为所有国内手术机器人公司追求的方向。随着医保政策对耗材的集采和设限,势必会影响机器人厂商的商业化进程。从而限制国内手术机器人领域的技术发展,进一步拉大与国际最新技术前沿的差距。
挑战五:应用推广:手术机器人的应用推广涉及病人,支付端。
从病人角度看,与内镜微创手术相比,机器人手术临床疗效特别是术后短期疗效并没有很快显现,费用却要高不少。从支付角度看,绝大多数手术机器人目前还只是手术辅助技术,不利于临床定价,医保政策和控费。从商业化角度看,手术机器人前期的研发投入和推广投入太高,效果显现旷日持久,市场培育期仍然很长,需要持续的高额投入,需要资本有足够的耐心。从大环境和应用手术机器人的理念来看,国内手术机器人太过于集中在三甲医院,配额受国家卫健委管理,只有副主任级以上的医师才有机会运用机器人开展手术研究,而国外更多地用于年轻医生,降低复杂手术门槛,加速有难度手术的普及和常规手术的标准化。
虽然机器人在骨科手术中运用挑战重重,但是我们也应该看到骨科手术机器人在数字化、精准化、微创化、个体化以及降低并发症等方面优势所带来的机遇,特别是骨科领域,在中国市场,这是唯一由本土产品占据了主要市场份额的手术机器人赛道。我们坚信手术机器人仍是未来手术发展进步的趋势和正确方向。
05
鑫君特机器人的特点
感知、决策、执行和控制是机器人的基本特征。鑫君特ORTHBOT®手术机器人具有更智能(全球首创智动置入手术通路导针)、更精准(机械臂定位精度<1mm)、更安全(首创压力传感器实时反馈置针压力)、更便捷(首创双目导航定位系统,无创稳定高效)的特点,从而实现规划+导航+智动精确执行,不仅仅是导航,而是真正地参与手术。它是目前为止唯一一个具备感知,决策,执行和控制全部四大技术特征的手术机器人,它重新定义了智能时代的骨科手术。(下表展示了不同脊柱手术机器人平台的置钉准确率)

表2:不同脊柱机器人平台的置钉准确率(Gertzbein Robbins分级A+B)(图表出处见参考文献)

图8 ORTHBOT®机器人自动置针系统
图9 2023年2月第40卷第1期《应用力学学报》中关于ORTHBOT®的介绍
骨科手术机器人的使命是帮助医生把骨科手术带入精准微创时代,从而使复杂手术简单化,常规手术标准化,智能化程度高的手术机器人的广泛使用,最终会降低整体医疗成本。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















