特斯拉人形机器人不如小米吗?特斯拉仅手部就27自由度
11月5号特斯拉机器人Tesla bot在进博会亮相了。有一说一走路不稳的它确实控制技术上差了波士顿动力能跑酷的机器人一大截,但还有人说不如小米cyber one的,这就过分了,二者明显不是一个水平线上的东西。
一、小米cyberone的局限性。
先看小米机器人在发布会上的表现,能顺畅走路,能递东西摆pose(图一),有语音交互,乍看起来完成度很高离商业化只差一步之遥。

但摆出参数(图二)就能发现问题了,小米机器人全身一共只有21个自由度,对照图片数一下,也就:
(左肩前后+左肩上下+左臂+左腕前后+左手开合+左大腿前后+左大腿上下+左膝盖+左脚前后+左脚左右)乘2+转腰=21 的水平。

小米机器人就算程序优化到天花板,大概率也只能实现正常走路外加粗糙的搬运工作,潜力性价比是比较低的。
二、特斯拉机器人的潜力设计。
反观特斯拉机器人,发布会海报摆出了一个比心手势(图三),这是个很巧妙的心思——别家的机器人还只能两指像钳子一样工作的时候,特斯拉机器人已经有五指像人一样工作的设计了。
具体来说,特斯拉机器人仅一只手就有11个自由度(图四),这是五个手指各自两个关节,再加拇指还可以内外弯的设计。
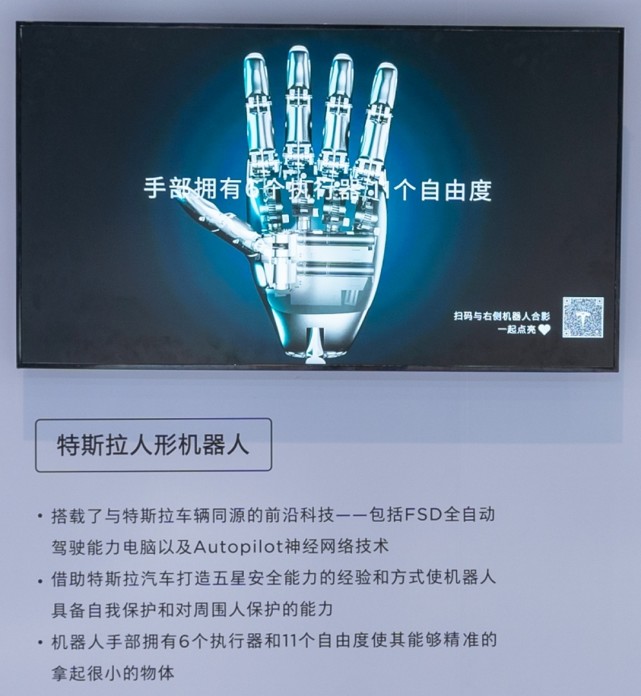
换句话说,只要特斯拉乐意去写比较固定的程序,这只手完全有能力实现弹钢琴、手语、转笔、纸牌魔术之类高级动作,跟小米机器人的两指只能拿东西相比潜力大很多。
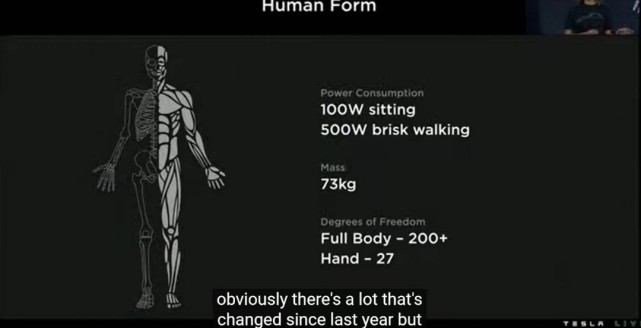
再看全身(图五),特斯拉机器人除了两个手掌各11个自由度外,还有手腕多发现旋转等设计,实现了仅手部就27自由度,全身一共200+自由度,显然这已经超过小米机器人太多了。
三、特斯拉机器人的找路王牌。
当然,特斯拉目前并没有真的花功夫写程序去弹钢琴什么的,因为这种固定程序局限性太强,很可能换个钢琴就得重新校准,换个手风琴就傻眼。
所以特斯拉目前的主要发力点在完善机器学习,先学会自己找路找工具,以便尽快和FSD打通一起完善自动驾驶避障,然后再主动使用工具解决问题(图六)。

总结来说,特斯拉机器人虽说现在控制做得很差走路磕磕绊绊,但从全身多自由度的细节可以看出,其潜力是远胜小米机器人那种单纯走路搬东西类型的产品的,结合后续机器学习完善找路功能和使用工具功能,长期发展空间更大。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















