致敬“她”力量:研发机器人的人,可以有多强?
近来,关于人工智能的话题被广泛讨论,智能聊天机器人ChatGPT、科幻电影中具备自我意识的人工智能系统MOSS火出圈。AI面试、AI绘画……越来越多的AIGC(利用人工智能技术生产内容)在工作生活中被应用。
很多人好奇,科学家如何推进机器人的研究?怎样驾驭潜力巨大的人工智能?
中国科学院院士,第十四届全国政协委员乔红,在人工智能研究领域深耕多年,她的团队提出构建包含视觉认知、决策、运动控制和肌肉骨骼结构的受人启发机器人系统(即通过对人体行为、肌肉骨骼系统和神经机制的借鉴和应用,使普通机器人实现高性能)。今天一起来看她的故事↓
在触手可及的未来,机器人会是什么样?
“一直以来,人们对机器人的梦想是:越来越接近人,成为人的助手和朋友。然而机器人的灵巧性、智能性和与人的‘共情性’还不能达到期望。机器人怎么能做得更好?怎么正确决策?一般性能的机器人系统,怎样通过智能算法,实现较高的性能?这些都属于我们研究的范畴。”乔红说。
作为一名机器人理论与应用专家,近期,乔红带领团队,专注于“人形机器人”和“智慧农业”等国家重大战略需求方向。
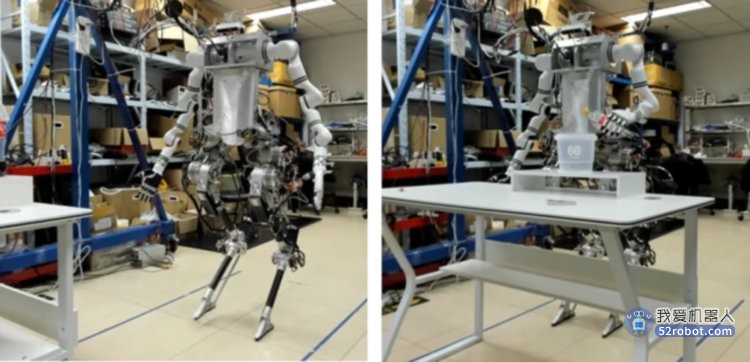
△乔红团队研发的人形机器人
研制便宜、通用、可代替人类进入危险环境的人形机器人,对于国家智能制造、应急救援等重大需求领域具有重要意义。
智慧农业则致力于让低成本化的人工智能、农业机器人回流造福于农业,使农业机器人在保障粮食安全等方面发挥不可替代的作用。
未来的农业机器人会是怎样的?
乔红在一次演讲中描绘了使用机器人进行农业生产的场景——机器人手是灵巧的、脚是敏捷的、眼是明亮的、脑子是聪明的,同时它的手足眼脑也是融合的。
“举例来说,在果树生产的场景中,机器人的手必须灵巧,我们不可能给每一棵果树、每一个果实建模,但机器人需要准确地抓到每一个果实,碰触植物又不会损伤到茎叶;机器人还要有明亮的眼睛,适应不同季节、不同环境的变化,实现快速地迁移、抓取等。”

关于机器人的研究,她开启了全新领域
乔红1964年出生于上海,父母是西安交通大学的教授。她自幼对机械格外感兴趣。1995年,她在英国获得博士学位,研究方向是人工智能和机器人。
乔红早期引起关注的工作是提出了机器人操作中的“环境吸引域”方法,被国际期刊报道为“乔的概念”。
“‘环境吸引域’的发现是经过长期研究探索后的灵光闪现。”乔红说,1999年,一次实验中,她忘了打开机器人的传感器,但是发现机器人还是成功完成了轴孔装配的操作,这引起了她的思考——人有时候是可以不需要眼睛看着就能完成操作的,那么机器人是不是也可以模仿人类,在不依赖传感器的情况下实现准确动作呢?
沿此思路,她第一次提出了机器人操作中“环境吸引域”的概念。她解释说:“比如有一个碗,从任何角度放一粒豆子进去,基于碗的形状,豆子在重力作用下总会落到碗的底部。我发现机器人的高维操作空间中也有这样的‘碗’,机器人通过控制接触点,可以在环境约束下从一个比较粗略的位置准确完成目标动作。”
经过大量实验,乔红团队从机器人装配任务到抓取、定位操作中一步步总结“吸引域”的形成条件,归纳“环境吸引域”的参照方法。
正是从“环境吸引域”入手,乔红开始了一路创新。
如何破解人工智能的应用难点?
2004年,在英国科研界已经崭露头角的乔红放弃了曼彻斯特大学的永久教员职位,通过“百人计划”回国,成为中国科学院的一名研究员。
她说,在自己的国土做出成绩,心里更有踏实感和满足感。“我们国家正处于发展壮大的关键历史时期。学有所成后报效祖国,是一个中国人的责任,也是一种荣幸。”
定位科研目标十年,乔红最终选择了机器人与神经科学的交叉融合,创建和带领团队从事机器人“手—眼—脑”工作。乔红介绍,“机器人未来发展的一个重要趋势是越来越接近生物,不再是冰冷的机器,有包括认知、情绪、逻辑、动作在内的一系列类人化的特征。”
“受人启发机器人系统对解决我国机器人产业发展的一些重要瓶颈或许会很有帮助。”乔红告诉总台记者,目前利用国产机器人进行高精度装配是一个较大难点。不少领域的工业机器人都是国外公司占领大部分市场,往往价格很高。“除了对机器人本身的研究兴趣和好奇心,帮助解决产业瓶颈,正是支持我前进的动力。”

她们时隔28年重返世界巅峰;她们在生与死之间筑起一面墙;她们为人工智能研究默默耕耘……中央和国家机关有很多杰出女性,她们在各自领域贡献力量。央视新闻推出专栏《致敬“她”力量》,今天是“三八”国际劳动妇女节,致敬每一个了不起的“她”。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















