今天不想去上班?让这些机器人代替你去工作吧!

SAR-401(又叫作“宇宙机器人”)据说能完成国际空间站90%的维修任务,而现在这些任务都是靠宇航员在太空行走中完成的。进行太空行走时,这个机器人将被安装在欧洲机器臂(European Robotic Arm)上。
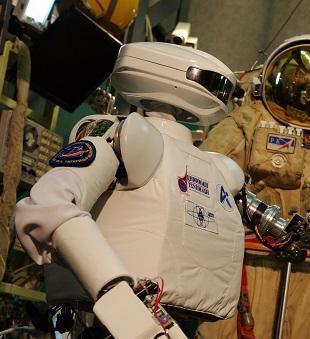
成像系统:SAR-401 的脑袋里装了五台照相机。有两台是为机器人工作提供立体视觉。还有两台辅助相机和一台红外线相机,用来探测深度。

动作感应:SAR-401 的动作控制是通过使用动作感应手套来实现的。操控人员带上动作感应手套,就能够对机器人的手和脚实现一比一的控制。它的动作幅度几乎能像人类一样大。

重型升降器魁梧的SAR-401 机器人在地球上能够举起10 千克的重量,在失重环境下能举起的重量更大。“机器人宇航员”一般抓取力是2.27 千克,而安卓系统的技术人员正在开发新的抓取系统,以提高机器人宇航员的抓取力。

机器人宇航员(Robonaut)虽然国际空间站上的机器人宇航员还在接受测试,但是这一系列的机器人最终将执行深入太空的探索任务,包括在火星和其卫星上登陆。

机器人宇航员没有腿,但是能够用轮子在表面行走,它就像一个侦察兵,能够为人类的火星之旅开路。

美国国家航空航天局已经为机器宇航员2号安装上了可以在失重状态下行走的双腿。这将帮助它完成更多工作。
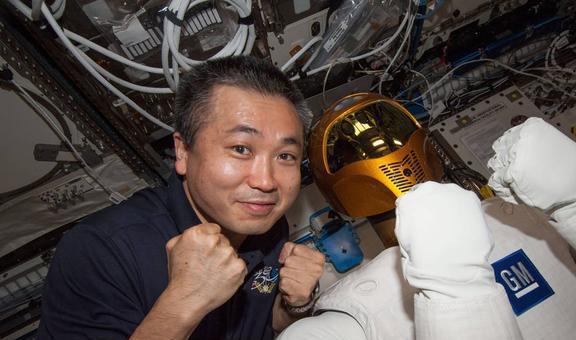
图为机器宇航员2号与来自日本航天局的39号指挥官Koichi Wakata的卖萌合影。

Kirobo:日本研发的太空机器人叫作Kirobo,它是一个具有声音及语言识别功能的机器人,身高33 厘米。Kirobo 的主要功能是研究人与机器如何互动,从而帮助我们深入了解机器人在未来的太空任务中对人的协助作用。

DextreDextre 也叫“加拿大手”,它有两条机械臂,能够在宇航员睡觉时在空间站外执行任务,例如更换电池和相机。它通过搭载大型机械臂“加拿大臂2 号”才能四处活动。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















