当协作机器人有了遥感力控,医疗、航空、沉浸式体验感MAX
优秀的协作机器人+力反馈装置
能做什么?
人有五感:触、视、听、嗅、味,其中,触觉(力觉)是唯一具有双向传递信息能力的信息载体。通过应用力反馈设备,客户可以真实地按照人类的肢体语言与机器人进行信息交互,获得和触摸实际物体时相同的运动感,即可以产生真实的沉浸感。
一款优秀的协作机器人+力反馈装置能够做到:操作者可以随意地自由运动,低驱动惯性和低摩擦,无动作限制,给客户真实的沉浸感。
集萃智造推出新款协作机器人和触力反馈装置系统。协作机器人可以结合力传感技术以及适当的末端执行器工具来完成所需的任务。 触觉力反馈的使用允许操作员手动控制机器人,而不仅仅是对其进行编程。这种实时交互模式允许操作者在移动机器人的同时,感受机器人末端执行器与环境之间的相互作用力。
协作机器人
集萃智造协作机器人,自制高功率密度电机、驱控一体化关节模组、高定位精度机器人本体,组成安全、易用、灵活、人机交互性能高。特有的拖动示教、碰撞检测技术和自开发的编程语言,在保证安全的基础上使协作机器人更加智能化、柔性化,操作简单,降低机器人使用门槛。用于精密制造、科研、教育培训、医疗护理等领域,灵活性高,适应性强,有效降低企业生产成本。

触力反馈装置
触力反馈装置采用omega.3产品,其优质的机械刚度与其实时控制器相结合,能够以4 KHz的速率渲染接触力。为了提供触觉透明度,设备的被动部件和致动部件结合在一起,可以在平移和定位空间中保持精确的重力补偿。每个系统都经过单独校准以确保可重复精度和性能。其独特的运动学设计使基座能够适应各种可互换的末端执行器,以满足多种应用需求。

应用场景不设限,医疗、航空、虚拟体验他都行
微创外科手术
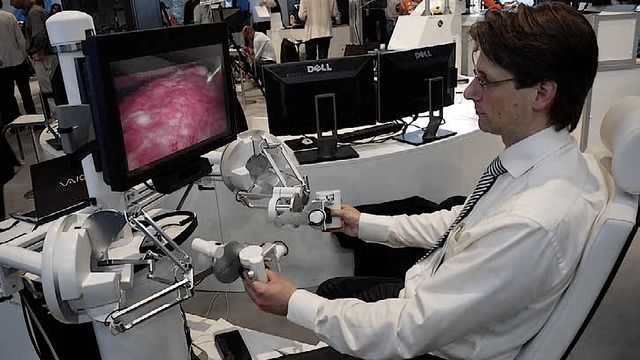
手术机器人作为现在医疗器械的代表,集现代高科技于一体。而现有 RMIS 系统的一个主要缺点是缺少力觉信息反馈,将力觉反馈应用于 RMIS 系统是一个活跃的研究课题,让机器人手术也能做到“手眼协调”。
远程手术

微外手术机器人的延伸应用,结合无线通讯、互联网通讯等方式,实现跨越时间和空间,给予病患及时的治疗。这个过程,力触觉所能提供的临场感更为重要,极大地为手术治疗安全性提供保障。
工业生产

用于“手艺型”机器人,精密装配或重型制造,如手表装配、重型零件机器人打磨。
康养艾灸

康养医学和机器人技术的完美结合,把机器人和计算机当作提高临床康养效率的新型治疗工具,在精细操作能力的恢复上,力触觉结合势在必行 。
防疫检疫

传染性疾病诊断中,采样、送样等工作使用遥操作机器人,可以大大降低交叉感染。如用于新冠检测的咽拭子机器人。
特种遥控
空间技术、海洋探索、军事战争......特种机器人具有极为重要的现实意义和浓烈的人道主义色彩。
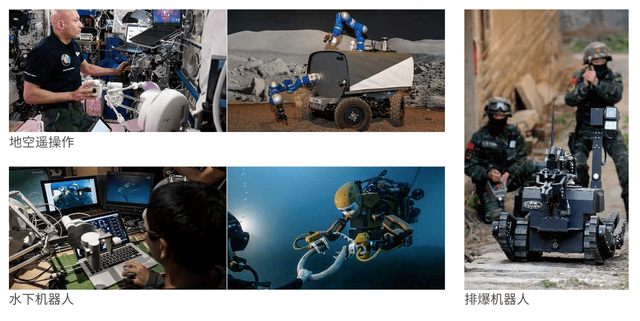
多领域迫切需要工作在危险或有害环境下的高级机器人,对应的机器人技术研究重点逐渐从全自主式向交互式发展,而临场感(Telepresence)是人-机-环境遥操作交互的核心。
微纳操控
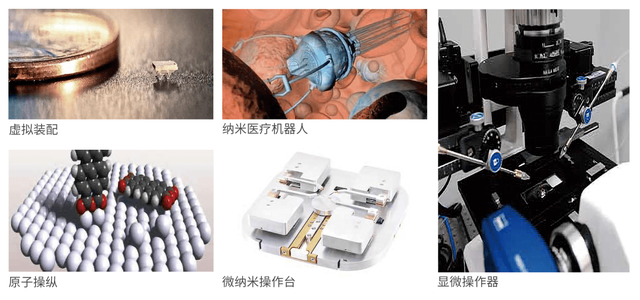
广义的微纳操控涵盖毫米、微米、纳米级器件的力位测量与运动控制,受当前技术水平限制,很难实现宏观器械的操控水平,但其巨大的应用价值必然要求微纳操控往高实时性和交互式发展。
虚拟培训

沉浸式虚实交互,实现特殊领域的技能培训,如飞行模拟训练、手术练习等。
未来
如今,在全球范围内,各行各业正越来越多地应用协作机器人。不仅仅在传统工业机器人领域,尤其在那些创新应用中,当机器人需要更高的柔性以及与人协同工作时,协作机器人的优势就越发明显。
未来,结合人机优势的这一协作模式,协作机器人将在 3C(电脑、通讯和消费电子)、医药、食品饮料、物流等众多行业中大有可为。在这些品类多、空间小、灵活度要求高的领域,机器人可以代替人类完成重复性的以及人类不适宜的繁重甚至危险的工作,而人类则从事自身更擅长、也是亟需柔韧性与灵巧度的工作。人机协作将帮助用户以有限的投入实现自动化升级转型实现更优的投资回报率。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















