机器人“心脏”:RV减速机内部结构分析
我们前面有跟大家了解过,rv减速机对于机器人来说是非常重要的,就像是机器人的“心脏”一样,那心脏的内部结构我们上初中学过,但机器人的“心脏”rv减速机的内部架构你了解吗,今天小编就为大家带来rv减速机机构分析。
rv减速机的原理是什么
rv减速机传动原理
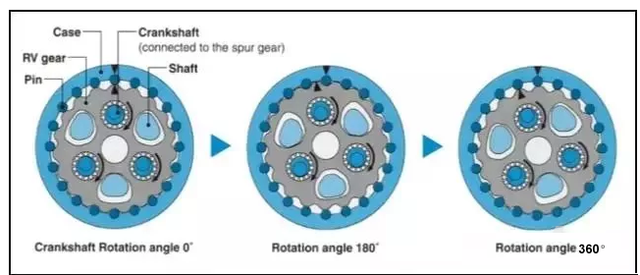
壳体内圈装有圆柱形滚针,由于rv齿轮的偏心运动造成滚针与摆线形rv轮齿的咬合与脱离,从而产生多组房车轮齿与滚针同时咬合,从而增加了载重能力。由于RV齿数比滚针少1个数,当偏心轴转动一周时,若固定外壳(case),RV齿轮角与输入轴同方向转动1个齿轮角。
输出端可以是传动轴(SHAFT),也可以是外壳(CASE)。若外壳固定,则以传动轴为输出,同向输出。如果传动轴是固定的,外壳是输出的,刚好相反的方向是输出的。更换固定和输出件,能获得不同的传动比。
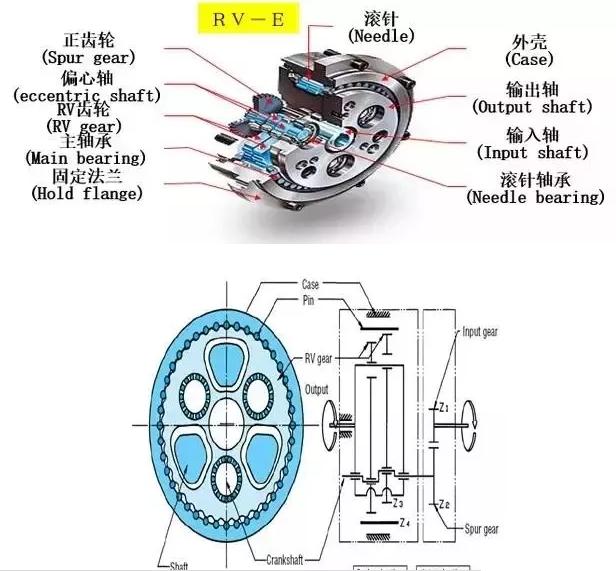
rv减速机内部结构
RV-E为两级减速齿轮,第一级减速为输入齿轮和正齿轮的外啮合,三个正齿轮(SPURGEAR)以120°的间隔与输出轴对称。
第二级减速通过正齿轮带动偏心轴,带动安装在偏心轴上的rv齿轮,使两个rv齿轮产生偏心运动。两个rv齿轮以180°相位差驱动输出轴,提供平衡载荷。
RV-C是两级减速齿轮,第一级减速是输入齿轮与第一中心齿轮的外啮合,再由第二中心齿轮与正齿轮的外啮合。三个正向齿轮以120°的间隔与输出轴对称。
以上就是机器人“心脏”rv减速机的内部结构分析,如还有要了解机器人rv减速机的可以联系我们,也感谢您的关注,后续我们会持续发布关于减速电机的传动内容。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。











是什么?")









