清华90后博导创业,人形机器人用上大模型,星动纪元成立5个月融资超亿元

距离人形机器人给你端茶送水的日子还有多久?这一场景已不再是异想天开。
1972年,日本早稻田大学的全球首台全尺寸人形智能机器人WABOT-1迈出10厘米花了45秒;2023年,一家国内创企的人形机器人小星,1秒钟就走了70厘米。
51年后,人形机器人从颤颤巍巍缓步行走,已经进化到能帮你取咖啡、烤串,还能在草地、野外落叶路、石子路等各种复杂路面稳步前进。

小星出自2023年8月成立的星动纪元,就在本周,这家创企完成了超亿元天使轮融资,由联想创投领投。此前该公司还完成了由世纪金源领投,图灵创投跟投的数千万元种子轮融资。
星动纪元机器人本体、驱动器、关节电机、控制算法等这些与人形机器人本体、小脑、大脑三大核心相关的零部件已经实现了完全自研。
预计2024年,星动纪元将推出全尺寸人形机器人,实现小批量量产出货,前期主要面向科研场景,并逐步扩展到工业、服务等多种场景。
其背后的灵魂人物就是清华大学交叉信息研究院助理教授、博导陈建宇,他在机器人领域已经有10余年研发经验,曾经涉足四足机器人、机械臂、无人车等。
大模型横空出世,人形机器人向更通用智能进阶,陈建宇联合团队发表了大型语言模型与人形机器人算法相结合的论文(论文地址:https://arxiv.org/abs/2307.00329),用大型语言模型指导小星的上层任务规划,用强化学习来获取小星的底层控制器。
去年以来,人形机器人产业的热度空前高涨,国外巨头玩家量产信号频发,遇到大模型的人形机器人“大脑”突飞猛进,在这种种变化背后,这家成立不久的创企将如何在人形机器人新时代写出自己的独特故事?
智东西与星动纪元创始人、CEO陈建宇进行了一场深入的对谈。这一切,要从他小时候的“机器人梦”说起。

▲星动纪元创始人、CEO陈建宇(身穿白衣)与星动纪元人形机器人小星合影(中下)
一、从保送清华启程,“机器人梦”逐渐照进现实
小时候,机器人的种子就开始在陈建宇的心里默默生根发芽。
受身为大学老师的妈妈影响,孩童时期的陈建宇经常出入大学物理实验室,观摩了一场场神奇的实验后,在百科全书和科幻电影的帮助下,他的脑海里构建起了对科技的初步认知。陈建宇说:“说不清楚为什么,我觉得这种科技含量高的东西,让我觉得非常兴奋、非常酷。”
2011年陈建宇就被保送到清华大学,就读精密仪器与机械学系——当时国内最早做人形机器人研究的单位之一。
一直伴随着陈建宇的机器人梦,在他的本科生涯中开始具象化,本科前两年接触机器人硬件,后两年关注机器人算法,本科毕设涉足了双足机器人步态规划。
2014年,陈建宇申请到美国加州大学伯克利分校读博,当时师从美国国家工程院院士、机电控制学科先驱Masayoshi Tomizuka教授。
在海外读博期间,正值无人车技术兴起,陈建宇的主要课题方向大多为无人机、机械臂,当时他关注的两条技术路线分别为模型预测控制(MPC)以及强化学习,这也是星动纪元现在做人形机器人的研究方向和算法。陈建宇解释,这是因为无人车本质上就是一款机器人,两者底层的模型结构很相似,只不过人形机器人的控制方面难度更多。
博士毕业回到清华大学时,陈建宇一开始尝试了研发无人车、机械臂、四足机器人等。2021年底,当技术积累逐渐增多,陈建宇内心的机器人梦重燃了,他要做一款自己的人形机器人。
2022年春夏之交,他正式启动了通用机器人的研究课题。
随着研发的深入,陈建宇开始思考人形机器人能发挥的更大价值,“理论上来看,没有一款机器人能像人形一样具备如此高的灵活度,以及完美跟人类社会适配的能力”,所以人形机器人未来上市可以对整个社会产生影响,技术逐渐成熟使得这一新形态的产品能真正走进人们的生活。
这一思考的最终答案就是,从酷炫走向务实,他萌生了去“做一家公司”的想法,让人形机器人的价值通过产品化、商品化的形式体现出来。
二、两年研发四代人形机器人,两种形态涵盖绝大部分场景
2023年8月,星动纪元正式成立,但他们的人形机器人产品诞生要早得多。
陈建宇透露,2022年春夏之交开始研发第一代“小星”,第二代从2023年初启动到7月初首次曝光,第三代与第二代的研发开始时间只间隔1~2个月,8月份正式亮相,如今已经迭代到了第五代,可以连续上下楼梯和上下坡 、自然步态行走,并实现极度崎岖地面、极度外力作用、30cm落差地面等条件下的自主平衡。
目前,星动纪元的人形机器人分小星和小星MAX两种形态。
从具体的应用场景来看,小星身高121厘米,体重28千克,身形小巧的它更注重通用移动能力,相对简化手部功能,可能会搭载一个抓夹来完成户外的物流、巡检等任务。
陈建宇谈道,小星不需要做太多需要精细操作的任务,并且其体积更小、自由度更精简,成本更低。在运动方面,它的跑跳、运动、平衡等能力能够更容易实现。
小星MAX从命名上也可以看出,其自由度、尺寸相比小星都更高、更大,身高为166.2厘米,体重46千克,手部还搭载了灵巧手,他们的设想是,让小星MAX能代替成人真正干活,进入工厂和家庭。

陈建宇认为,目前星动纪元具备的这两种形态已经基本涵盖绝大部分场景,未来他们可能会通过部件模块化做一些场景细分。
为什么星动纪元能做到如此快的迭代速度?背后星动纪元研发团队构建的完善技术栈起到关键作用。星动纪元在硬件领域的研发人员都和陈建宇一样,有十余年的经验积累,算法领域的团队还会包含学术研究能力强的高校博士毕业生,他们都对人形机器人有非常强的信念,或者可以说他们和陈建宇一样,都有一个“机器人梦”。
在这个信念的支撑下,星动纪元一步步搭建起了自己的技术栈:先是初步搭起硬件层,让机器人先走起来、走得更灵活以及核心零部件全自研同步推进,然后给机器人装上眼睛、搞定双腿双手。这正是从去年到现在,他们在做的事。
陈建宇对于星动纪元的未来是这样规划的:在技术上,做到从1到10,让小星走起来、跑起来、跳起来,同时手部动作更通用、操作能力更强;在产品上,做到从0到1,更快实现产品的量产、市场开拓、产品打磨。
在这背后,陈建宇抽象出了一家人形机器人创企的成功关键,那就是过硬的硬件能力、对机器人和AI能力的深入研究以及很强的学术能力,最后一点的关键在于,很多人形机器人领域的技术难题需要学术研发能力进行发现总结,并将这些新的问题总结转化成产品。
三、三大核心要素,关节电机峰值转矩密度超头部玩家
在陈建宇看来,人形机器人必备的三个要素就是,好的本体、灵活的小脑、发达的大脑。
第一个是本体,为了让人形机器人的本体更加灵活,在硬件侧,星动纪元自研本体感知驱动器,使用自研高扭矩密度模块化关节以及一体化结构设计,核心零部件完全自研,使得机器人能够移动迅速,同时抗冲击能力更强,成本更低。陈建宇谈道,他们是国内最早一波做出来的。
其中,关节电机采用了正弦化磁场调制及电磁负荷调配技术、磁路拓扑结构优化及电磁-结构-流体多物理场耦合设计等关键技术及方法,峰值转矩密度高达36Nm/Kg,并获得了第三方标准化检测报告,比目前市面上可以买到的德国TQ电机核心指标高一倍以上。
▲星动纪元自研本体感知驱动器
目前,小星已经可以在草地、石子路、落叶等多种复杂路面上实现稳定行走,陈建宇解释道,他们主要采用了两种方法,首先是高频力控,人形机器人通过高频反馈的力控制器,在应对突发干扰时,能及时调整身体状态;其次是强化学习,这一方法能进一步提升人形机器人的稳定性,他们已经将同样算法印证了四足机器人可以适应复杂地形,正逐步在人形机器人上迁移印证。

第二个是小脑,灵活的小脑是控制机器人平衡的重要支撑,针对于人形机器人的应用特点,星动纪元优化了控制算法,使得人形机器人的平衡控制、动态性能更高。
研发小脑部分的算法层面,星动纪元主要采用的是仿真训练,陈建宇介绍了两种方法:基于模型和基于数据。
首先,基于模型的控制方法可以通过高精度物理仿真测试机器人,并且在仿真中对算法进行判断验证,就可以提高机器人相关性能的测试效率,同时降低机器人本体测试过程的损坏频率;基于数据的方式指的是,人形机器人在仿真里进行走路的尝试和交互时会获取到很多数据,这就可以进一步做为其数据来源学习如何走路,基于其在仿真里见到的不同情况学会应对各种任务,然后再将算法迁移到真机上。
星动纪元还研发了双臂灵巧手算法,陈建宇举了个例子,他们在仿真里可以让灵巧手拿起一个复杂形状的东西,然后扔到另一只手上,或者双手配合玩魔方等。
第三个就是大脑,人形机器人需要发达的大脑,让机器人足够智能来完成指令。陈建宇谈道,星动纪元在全球首次提出将视觉语言模型、大语言模型与人形机器人算法进行整合,用大型语言模型指导小星的上层任务规划,用强化学习来获取小星的底层控制器,构成的框架可以增强其执行任务的智能性和泛化性。
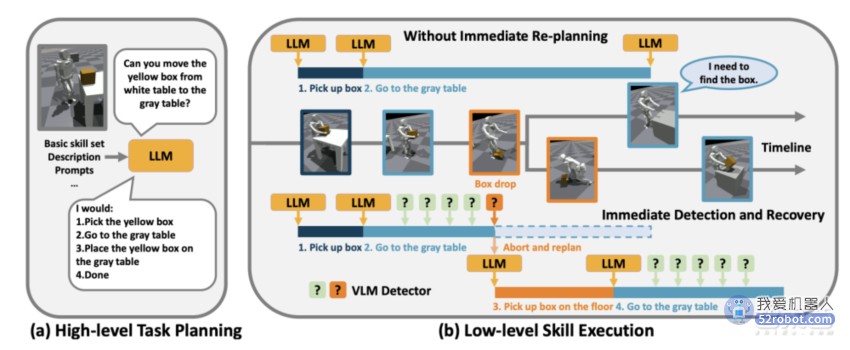
▲星动纪元提出的视觉语言模型、大型语言模型与人形机器人算法整合框架
与此同时,陈建宇称,他们还会自己设计Benchmark,让小星在一些有障碍物的环境里避障,按照指令搬运物体、根据相应的菜谱完成食物的准备工作等。

他还提到了星动纪元下一步重要研发方向,前面提到的这套框架下大脑和小脑相对分离,中间会通过语言等媒介实现交互,他们将思考如何让大脑和小脑结合的更加紧密,甚至于让大脑本身拥有小脑的一些功能,不光处理语言、视觉,还可以生成一些行为、动作,在整个动作控制层面的效果和智能性上得到进一步提升。
此外,人形机器人还有一大好处就是,因为其与人的外形相似,可以靠人做相应的动作拿到数据,然后机器人从中学习,使得数据获取成本更低。
四、未来,人形机器人总量将超任一专用机器人
大模型引爆的新技术革命激战正酣,被看作通用人工智能终极载体的人形机器人迎来了新风口。陈建宇谈道,近年来人形机器人本体技术的快速演进与大模型的出现,使得人形机器人的泛化能力实现了从0~1的跨越。
工厂的机械臂等机器人相关应用已经相对成熟,但其局限在于做的事情较为有限,人形机器人这类新一代机器人,随着大模型的出现,在硬件、软件、智能性、交互性等方面得到更大提升。他认为,从技术可行性的角度来看,也就是说开发出下一代机器人的可能性已经具备。
除了技术突破外,还有一大变化就是如今人们生活质量提升,一些传统劳动岗位出现招工难,可以弥补生产力缺口的人形机器人需求上涨。
人形机器人因其与人类相似的外形特征,和整个人类社会环境的适配度很高,几乎可以适用于所有场景。
因此,陈建宇认为,最终的结果就是在每一个场景里,有一两款专门的特有机器人去完成一部分工作,人形机器人去做剩下的工作,所有这些场景加起来,这有望使人形机器人的需求量超过任何一类专用机器人。
除了大模型发展外,市场还释放了很多积极信号。马斯克在特斯拉二季度业绩会上透露将在11月进行人形机器人行走测试,同时其样机迭代从“功能实现”进入了“量产实现”环节。
值得一提的是,马斯克的人形机器人以及亚马逊投资的Agility Robotics公司都选择了让人形机器人进入工厂、仓储等环境中试用,通过打磨迭代,再进行量产。陈建宇透露,星动纪元也是如此,他们将通过合作方提供的一些场景,进行人形机器人试用和产品打磨。
结语:大模型时代,人形机器人商用落地升温
如果回溯人形机器人产业的发展历程,可以看出现如今其技术及商业落地的迭代节奏远快于前几十年。
陈建宇谈道,上个世界七八十年代,日本对人形机器人的研究主要停留在缓慢的步态行走;2018年往后,波士顿动力让人形机器人变得更加动态;现在随着大模型的出现,人形机器人进入了智能化+商业化落地的重要阶段。
在这个过程中,波士顿动力作为人形机器人产业具有标志性意义的公司,其在技术领先性上毋庸置疑,但对于人形机器人创企而言,他们需要做性能和商业化的平衡。陈建宇认为,要将机器人成本和人的工资进行对比,按照工资来算能实现回本,人形机器人才有商业化的价值。
他补充说,具体的应用场景是否需要人形机器人负重、搬运、走得快或者小跑等才是影响他们设计的标准。
不过,相比于国外巨头在技术上的领先,国内人形机器人的迭代进展更快,再急于场景丰富的国内土壤,机器人真正放到场景里去打磨、迭代的可能就会更多。陈建宇相信,国内人形机器人创企如果以现在的速度保持产品、技术迭代,“超越国外巨头是迟早的事”。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。




















