网红机器人背后:现代汽车的未来出行展望
在你的印象中,现阶段的机器人可以做什么?
根据设定好的程序重复着机械似的动作?能做简单的交谈但还是经常回答“对不起,我不知道”?
估计不少人看完这次的视频都跟我有一样的反应:“这体态也太像人了吧!”

其实2016年Atlas刚刚亮相时,它连路都走不稳,像一个蹒跚学步的婴儿。
而现在,它是一个可以听懂人类需求,灵活进行活动,在完成任务后还做出握拳向后肘击的动作表达“YES”情绪的“成年人”,这一切都要归功于它的创造者:波士顿动力公司。

“啃老”的天才
波士顿动力公司1992年才成立,创始人是麻省理工学院电气工程和计算机科学教授马克▪雷伯特,主要业务就是开发实用的机器人。他们目前的核心产品有系统Pick、机器狗Spot、两足机器人Atlas、和手柄Handle。

Pick实际上指的是一套机器人系统,这套系统包括算法和传感器,搭载了“Pick”系统的机械臂可以完成混合SKU托盘的构建和卸垛。
机器狗Spot配备了各种传感器和摄像头,可以代替人类执行各种任务。可以在高温、极寒等极端条件下或自然灾害地区、放射性污染地区等人类难以进入的危险地区执行任务。

Atlas作为波士顿动力唯一的一款人形机器人,则一直未被用于商业,它自诞生起就一直在学习如何更像人类,目前的主营业务应该是当网红,扩大自己的影响力。

Handle可以通过机械臂构建托盘和箱子,波士顿动力公司还为DCL公司打造出Handle的下一代Stretch,一种新的移动机器人,它有一个覆盖着吸盘的手臂,能够从卡车拖车的后面拿起并将50磅重的箱子移到仓库里。

Stretch在搬运箱子
创造出这样的智能机器人,自然会有资本家挥舞着支票来求购。
但波士顿动力公司从2018年才开始明确向商业化转型,此前这群科技狂人一直在专注于让作品更加完美,由于迟迟未实现商业化,收益惨淡的同时还背负着巨额研发费用,从谷歌到软银集团再到现代,波士顿动力公司几经易手。

2022年8月,现代汽车集团与波士顿动力公司共同成立了波士顿动力人工智能研究所,领导人由波士顿动力公司的创始人马克▪雷伯特担任,在四个技术领域(认知性人工智能、运动型人工智能、有机硬件设计、伦理和政策)开展工作。

波士顿动力人工智能研究所明确了不背负营业压力,以人工智能、智能机器进步为目标,波士顿动力公司则致力于商业化机器人发展。
现代集团为波士顿动力公司完美地解决了梦想和经济的矛盾。
千里马遇财阀伯乐
与本质上是软件公司的谷歌和本质属于风险投资的软银集团不同,现代集团本身就立足于制造业,经营范围涉及汽车、电子、机械等等,它浑厚的技术积累和愿意长期投入的研发理念更加适合波士顿动力发展。

郑义宣曾表示将减少现代汽车集团对传统制造的依赖,未来机器人业务将占集团业务的20%,汽车制造占50%,城市空中交通占30%。波士顿动力公司在现代汽车集团受到了前所未有的重视。

经济和背景方面满足以后,就该谈谈理想了。除了制造机器人作为工业产品,波士顿动力公司和现代汽车集团还有个共同的目标:智能出行。
现代汽车集团曾发布过一款名为“Tiger”的无人驾驶概念车,Tiger(Transforming Intelligent Ground Excursion Robot)是可变性智能地面巡行机器人的英文缩写,它外观颇有变形金刚的意思,拥有四足,能跑能爬能飞。

现代汽车集团拥有波士顿动力公司后曾严肃声明“Tiger”会被造出来。“Tiger”何时被造出来我们不能确认,能确认的是,波士顿动力的机器人与现代的智能电车在某些技术层面不谋而合。
说回文章一开始我们看到的机器人Atlas,它与智能电车面临同一个技术难关,那就是攻克电池续命问题。另外与智能驾驶相同,它也需要强大硬件和智能算法的结合,每一刻都在进行感知-融合-决策-执行的流程。
以点到点的移动为例,首先Atlas需要感知并识别到达目的地途中的障碍物。
大家想象一下,你左前方30厘米处和右前方80厘米处各有一个圆形的碗,你闭眼伸手进行了全方位触摸。接下来我单独给你看了一张照片,那么你结合这张2D照片和自己的触觉就可以判断出距离和障碍物。
同理,Atlas通过相机(类比2D照片)和雷达(类比触觉)等传感器中的数据判断周围环境,转换为对决策制定优异的东西。

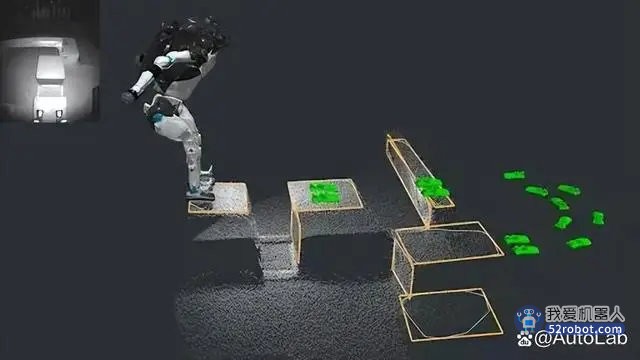
深度相机拍摄的 Atlas 机器人的点云旋转视图
Atlas使用TOF深度相机以每秒15 帧的速度生成环境的点云(类比触觉画像),Atlas的感知软件使用一种名为多平面分割的算法从点云中提取平面。映射系统得到点云信息和相机画面后就开始为各种不同对象构建模型。
Atlas会将这些检测到的对象用于规划特定行为,比如绿色的脚步代表下一步要跳到哪里。接下来就是执行,通过控制关节位置、力传感器等硬件来进行活动,并且实时更新感知数据以及决策指令。

为了执行移动行为,波士顿动力的研发团队为机器人提供了一张高级地图,其中包括研发人员希望它去的地方以及沿途它应该做的动作。
该地图与真实路线的几何形状不完全匹配,而是一个包含障碍模板和注释动作的近似描述。Atlas 使用这些稀疏信息来导航,并使用实时感知数据来填充细节。

另外Atlas有自己的行为库,Atlas的每个动作都源自使用轨迹优化提前创建的模板。通过创建这些模板库允许研究者向库中添加新的轨迹,从而可以不断为机器人添加新的功能,比如奔跑、后空翻。

通过离线设计、轨迹优化,研究者可以在设计时捕获这种类似的重要约束,并使用单个通用控制器在线调节机器人。
如果将这些技术放到智能汽车上,我们可以畅想一波儿:只要实现了精细到1米范围内的感知,那对现在汽车来说,鬼探头测试秒变小case,行车安全性直接翻倍;
语音助手能高度理解人类需求并具有强大的操控力,智能座舱真正兼任AI管家,高合汽车内那根机械臂,绝不止是做做动作逗人开心,起码可以帮你抽出纸巾去擦拭泼在椅子边的牛奶。

而现代汽车对未来出行的前卫概念产物“Tiger”也能够从屏幕中走出来,上演现实版“擎天柱”,狂飙到你面前一个急刹并站起来。人类不敢踏足或难以接近的区域也将由这些智能机器代为探索。
另外,当工业机器人技术成熟后投入生产,能够大大提升产业效能,大幅降低汽车成本。
不过这目前还是畅想,现代汽车集团目前的重心还是继续波士顿动力现有的发展轨道,也就是 Spot、Handle 和 Atlas。
Robot?Hunman!
在2022年CES展览上,现代汽车集团以“拓展人类触角”(Expanding human reach)为主题,展示机器人技术的未来愿景。

现代汽车集团郑义宣会长和波士顿动力公司总裁Marc Raibert合影
现代汽车的机器人技术愿景具体就不在这里详谈,但是他们的终极目标是希望能将人类的移动出行范围扩展到虚拟世界。
现代汽车认为,在此过程中,人工智能、自动驾驶等创新技术的应用将打破未来移动出行的界限,汽车和城市空中出行等移动出行方式将成为与元宇宙的连接点,特别是机器人技术有望成为连接这两个领域的媒介。
例如,将汽车转变为可以连接虚拟世界的智能设备,用户可以在汽车内进入如同现实的虚拟世界中实现多种用车体验。
根据用户的需求,汽车既可以成为娱乐空间,也可以成为办公的会议室,甚至可以变成享受3D电子游戏的平台。还可以通过数字孪生连接虚拟与现实世界。
当虚拟世界通过机器人与现实世界相连接时,用户还可以感受到仿佛置身于现场的生动体验。
机器的未来,是人类的未来。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















