下一代的军工、探月机器人,可能是个“球形机器人”?
大多数人认为的下一代军工机器人可能是这样:

实际的军工机器人却可能是个“球”?

近期,外媒有消息称,美国国防部创新实验室 DARPA可能将加利福尼亚州伯克利市的Squishy Robotics Inc公司制造的球形机器人用于实战演练,不仅如此,同样参与测试的还有美国Revolute Robotics等公司推出的自主混合移动机器人(HMR)。
而中国也有类似生产球形机器人的企业,根据兵工集团展示,京安公司的"守望者"系列机器人,以及逻腾科技RT-G球形机器人都有应用于军事的潜力。

01
球形机器人的发展演变
球形机器人一直是全球机器人研究领域的热点,但因为基础理论不够完善,技术层面更处在起步阶段,全球正式发布的成果一直较少。
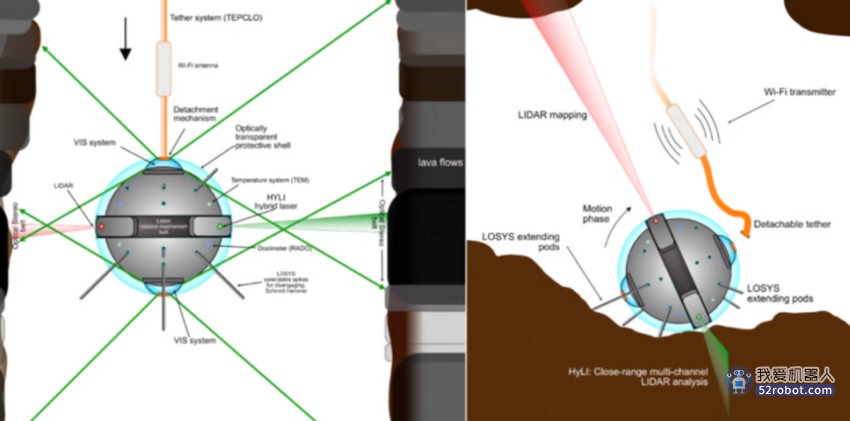
在最初,球形机器人主要是为探月而设计。
例如欧洲空间研究与技术中心(ESTEC)就研发过了一款球形机器人,这款被称为“月球地下结构深层自主下降与探索”(DAEDALUS)机器人,由德国巴伐利亚州维尔茨堡朱利叶斯-马克西米利安大学(JMU)领导的团队设计,这个名为DAEDALUS 的球形机器人约 18 英寸(46 厘米),可以通过绳索下降到月坑。
球形机器人本质上(spherobots)是一种以球形作为其设计基本方面的机器人系统。它的基本设计原理和结构与传统机器人构型完全不同,具有非常强的前沿性和创新性。
之所以设计为球形,是因为这种形状更为紧凑、紧密,且能较高有效载荷和高度自主性。
一方面它能用特殊材料包裹,保护内部免受恶劣月球环境影响。另一方面通过立体视觉系统和激光测距,它还能360 度全方位观察周围环境同时实现自动导航。
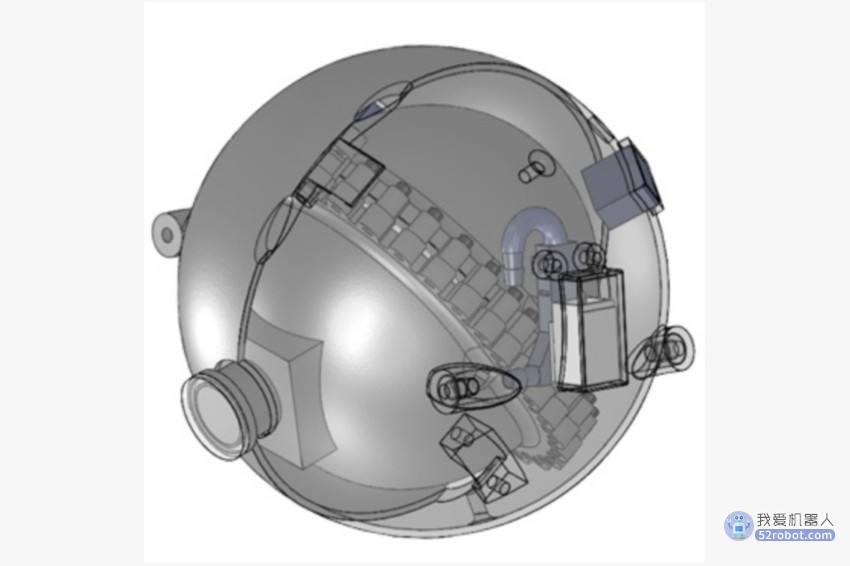
球形机器人通常由球壳+球体组成,外壳可以封装例如电机、传感器、控制器和电源等各种内部组件,内部主要采取质心旋转机构。运动方式简单来说就是以改变机器人重心的方式并激活内部驱动电机,以启动滚动这种非常规的运动方法。
球形机器人在特定应用中具有独特的优势。例如传统轮式或腿式机器人可能面临挑战的环境中的室内导航。或者可以以更小的体积进行监视和监控,尤其是在狭小空间或崎岖地形中。
早在2011 年7月 ,MIT达贝洛夫信息系统与技术实验室就公布过他们在球形机器人的探索成果。当时这个鸡蛋大小的球形机器人,旨在用于进入福岛核反应堆地下管道,检查腐蚀迹象。当时这款球形机器人已经配备了摄像头,能够承受反应堆的极端放射性环境,并从内部实时传输图像。
他们提出了一种叫做“extremely fail-safe”的概念,为了保障在核电站意外下的运作安全,所以路线上选择了一次性使用,然后回收的方式。而后2011年IEEE 上,这个机器人概念进一步被完善,他们提出了“仓鼠球”概念,即像仓鼠那样,通过改变球的质心位置,从而实现球形机器人能朝着一个方向滚动。
研究者在机械上通过一种两轴万向节实现了任意改变机器人的质心目的,又采用了类似无人机云台的稳定机构让相机能保持一个稳定水平面运行。该研究也被认为是球形机器人实际应用的起点。
当时佐治亚理工学院机器人和智能机器中心主任 Henrik Christensen认为,这种机器人不仅可以用于监控核反应堆,还可以用于检查其他狭窄、密闭的空间——例如庞大的城市下水道管道。
球形机器人的研究最早可以追溯到一篇名为 "A Spherical Robot with Internal Omni-Wheels for Omnidirectional and Holonomic Motion on Flat Terrains"的论文,这是在1995年IEEE ICRA的一篇内容,介绍了一种带有内部全向轮的球形机器人的概念,讨论了球形机器人独特运动能力的运动学、动力学和控制策略。
而后MIT一篇"Design and Implementation of Spherical Robots for Planetary Exploration"的论文将球形机器人的机械结构、传感系统和控制策略进一步完善,这是2004 年IEEE/RSJ IROS的一篇内容,讨论了用于行星探索的球形机器人设计和实现方式,开启了这个领域的创新研究。
但即便如此,球形机器人的研究和实际产业化进程一直落后于其它类别的机器人。
02
球形机器人的产业化应用实践
近年来,国内外对于球形机器人有不少企业开始进行探索实践。
例如Sphero公司就开发了一款专为教育和娱乐而设计的小型球形机器人,这也是全球少数卖起量的球形机器人。
这款机器人采取了透明塑料的球形外壳、发光的 RGB LED 面板、JavaScript Wiki 页面以及教程和项目数据库,与其说这款卖149.99美元的产品是机器人,如果说它走向了一条编程玩具的路线,并快速将产品范围扩展到其它编程玩具上。

Sphero公司的一些技术还是具有参考价值。例如为了保持平衡,Sphero公司使用更低成本的 IMU来读取加速度计(测量加速度)、陀螺仪(旋转速度),并通过两个编码器(跟踪运动和距离)和两个电机来处理机械运动。Bolt自身内部像一个云台,通过旋转以保持平衡,使其光矩阵能时刻保持在顶部,动力元件保持在底部。
又例如Revolute Robotics的混合移动机器人 (HMR)则代表了另外一种路线,即采取具有一定程度的可变形性的轻质外骨骼作为骨架而非封闭结构,这种笼状球形结构更加轻便而且易于携带,不仅可以向任何方向滚动,并可以使用两个陀螺仪万向环像多旋翼飞行器一样低空飞行。
这种混合模态的运动方式,也使得机器人有助于避开障碍物或飞越障碍物,还能实现弹跳。由于非常轻便,这款HMR 在地面上滚动可将运行时间延长五倍以上,以节省能源。

有网友调侃,Revolute Robotics的混合移动机器人说是球形机器人,不如说像是无人机外面加上一个球形的外壳。
但这款多模态机器人其实能更好使用多任务规划算法,可以在最少的编程下自主操作,设计用于多种应用,包括密闭空间检查、自动安全巡逻、建筑和矿井测绘以及军事监视等,实际价值或许远大于人们的预期。
例如Squishy Robotics Inc公司推出的同样是笼状球形机构机器人。这种拉索整体设计灵感来自于理查德·巴克敏斯特·富勒(Richard Buckminster Fuller)的内嵌富勒烯结构。
其采用 6 个压缩元件(即杆)和 24 个其他元件(即电缆或电线)构成,连杆内有电线,可以拉伸或松弛,从而调整机器人整体与地面的各个接触点,改变重心并使机器人沿所需方向滚动或旋转。

由于该机器人的固定重量不到三磅,能让机器人从几百米的高空中掉下来也没有损坏。目前该公司还在测试机器人从1000- 50000 英尺高度的坠落模态。如果可行这意味着机器人未来能从大炮中射出,也可以被无人机或者商用飞机空投到一些复杂地形。
由于机器人上有着传感器和视觉,能够用于众多公共安全、国防和工业应用。该公司目前挂在加州大学伯克利分校的 Skydeck 加速器,得到了NASA 的50 万美元拨款和美国国家科学基金会 SBIR 基金的22.5 万美元补助。

例如国内的逻腾科技球形机器人则采取了全封闭设计,为了能够实现水陆两栖移动。该机器人同时采用自适应运动控制,还有自动驾驶系统,让机器人适应不同的运动条件。
该产品利用‘昆虫复眼’这样一个仿生学概念,通过多个摄像头构成全场景感知,根据球体本身的姿态参数,对信息进行校准,选取方位角合适的传感器数据形成感知图像,帮助机器人具备了相当不错的自主性。

该机器人未来有望在民航机场、地下管廊、能源、化工等关键要害领域中被用于安全防范、监控巡检,及反恐维稳等警用勤务,并且在多家民航机场、地下综合管廊、石油化工园区,及公安机关已投入使用。
而京安公司的"守望者"系列球形机器人则是一个椭圆结构,整个机器人就像一个皮球一样,两端有透明的保护罩。
从运动方式来说,其主要依靠球壳内部的驱动机构实现滚动行走,驱动原理是偏心质量驱动法,即通过摆锤原理不断调整和改变球体的重心位置,从而产生偏心力矩使机器人向前或向后滚动设备舱布置在球体两端。
该机器人两端则集成了无线电通信,GPS接收器,激光传感器、控制和信息传输系统,位置传感器、摄像头等设备。

"守望者"400整机重15千克,平地最大滚动速度20千米/小时,平地经济巡航速度5千~8千米/小时,零初速最大运行坡度20度,连续运行时长12~15小时,最大巡航里程150千米,未来在野外作业、反恐及灾难救援和社会服务等领域都具有相当广阔的应用前景。
03
结语与未来
在国内外的大多研究中,认为球形机器人不论从成本、效能还是体积和稳定性上都有更强的优势,非常适合在非友好环境下长时间执行巡逻、监控、探测、救生、对抗、处置,以及查打一体等多种任务。
但球形机器人目前依然面临一些挑战。例如在技术上,想要确保机器人在运动过程中保持稳定,需要更进一步解决平衡与稳定的问题;例如为了提高机器人的适应性,还需要为更复杂的运动模式开发精确的控制算法和硬件;还有在续航方面,可能还需要更加优秀能提供为机器人的运动和内部组件高效供电的电源管理方法。
国内外一些领先公司正尝试采用新的材料和结构设计以解决这些问题,未来有望实现进一步的突破。
球形机器人会达到一个什么量级的市场规模,我们借用逻腾科技创始人、浙江大学博导王酉教授在接受采访时的一个看法:“球形机器人会与四足以及腿足机器人的市场规模相当,是一个千亿级别的庞大需求市场。球形机器人与四足、多足机器人比较,其滚动的运动方式摩擦力极小,能量效率是腿足机器人的8~9倍,并且可以连续工作10小时,行驶120公里,虽然在爬楼梯等极个别场景中存在一定的缺陷,但是在大部分移动场景中,其优势格外突出。因此,不论从成本,还是效能,球形机器人的应用较之四足、多足机器人都有着明显的优势。”
论文参考:
(1)"M-TRAN: Self-reconfigurable modular robotic system" by T. Murata et al.
(2)"Design and kinematics of an omni-directional spherical mobile robot" by M. Zeeshan et al.
(3)"Design and Development of a Spherical Robot for Remote Inspection" by S. J. Thakur et al.
(4)"Design and analysis of a spherical mobile robot" by M. Y. Adib et al.
(5)"Development of a Ball-Shaped Mobile Robot with Inverse Pendulum Mechanism" by T. Hirata et al.
(6)"Design and Implementation of a Spherical Robot Platform for Human Interaction" by S. Ullah et al.
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





















